本文为原创文章,未经本人允许,禁止转载。转载请注明出处。
1.线性空间与基
线性空间亦称向量空间。我们用的线性空间通常为实系数线性空间。
实系数线性空间是一个由向量组成的集合,向量之间可以做加减法,向量与实数之间可以做乘法,而且这些加,减,乘运算要求满足常见的交换律和结合律。我们也可以类似地定义其他系数的线性空间。
⚠️线性空间必须要有原点。例如一个有原点的平面就是一个线性空间(有了原点才能定义向量及其运算)。
‼️基是线性空间里的一组线性无关向量,使得任何一个向量都可以唯一的表示成这组基的线性组合。基给出了定量描述线性结构的方法:坐标系。坐标即为基的系数。
所以基是不唯一的,基的选择取决于要解决的问题。没有十全十美的基,只有适合解决问题的基。
2.线性映射与矩阵
👉线性映射是从一个向量空间V到另一个向量空间W的映射且保持加法运算和数量乘法运算。线性映射的本质就是保持线性结构的映射。
👉线性变换是线性空间V到其自身的线性映射。
有的地方将线性映射和线性变换视为同义词,参考:线性映射。【数学基础】系列博客倾向于将其视为同义词,不再区分。
👉线性映射的矩阵描述:
V,W分别为n,m维的线性空间,$\alpha=\{ \alpha_1 , … , \alpha_n \},\beta=\{ \beta_1 , … , \beta_m \}$分别为V,W的一组基。$T:V \to W$是一个线性映射。于是$T,\alpha,\beta$唯一决定一个矩阵$A_{\alpha,\beta}(T)=[A_{ij}]_{m\times n}$,使得:
\[T(\alpha_j)=\sum^m_{i=1} A_{ij} * \beta_i , \forall j \in 1,...,n \tag{1}\]式(1)等价于:
\[T(\alpha_1,...,\alpha_n)=(\beta_1,...,\beta_m) \cdot A_{\alpha,\beta}(T) \tag{2}\]简记为:
\[T(\alpha)=\beta \cdot A_{\alpha,\beta}(T) \tag{3}\]👉举个例子,假设我们现在有线性空间V,基为$\{ \alpha_1,\alpha_2 \}$。我们将其逆时针旋转$\theta$得到新的线性空间W,基为$\{ \beta_1,\beta_2 \}$(假设基都为单位向量)。那么该如何描述这个旋转映射呢?
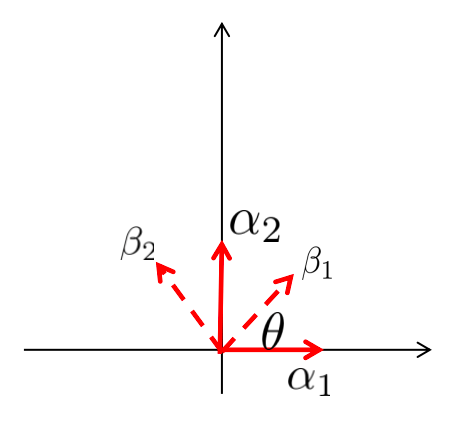
式(4)中的矩阵就是用来描述这个线性映射的。
👉再举另外一个例子,如果我们要将三维空间(基为$\{ \alpha_1 , \alpha_2 , \alpha_3 \}$)线性映射到二维空间(基为$\{ \beta_1,\beta_2 \}$),假设有:
- $T(\alpha_1)=\beta_1$
- $T(\alpha_2)=\beta_2$
- $T(\alpha_3)=\beta_1+\beta_2$
则:
\[T(\alpha_1,\alpha_2,\alpha_3)=(\beta_1,\beta_2) \begin{bmatrix} 1 & 0 & 1 \\ 0 & 1 & 1 \\ \end{bmatrix}\]👉如果我们选取V,W的另外一组基,$\widetilde{\alpha}=\alpha \cdot P,\widetilde{\beta}=\beta \cdot Q$,那么存在矩阵$A_{\widetilde{\alpha},\widetilde{\beta}}(T)$使得,
\[T(\widetilde{\alpha})=\widetilde{\beta} \cdot A_{\widetilde{\alpha},\widetilde{\beta}}(T)\]P,Q为基的变换矩阵。
\[(\widetilde{\alpha_1},\widetilde{\alpha_2})=[\alpha_1,\alpha_2] \begin{bmatrix} 1 & 3 \\ 2 & 4 \\ \end{bmatrix}\] \[\begin{bmatrix} 1 & 3 \\ 2 & 4 \\ \end{bmatrix}\]
例如有:
$\widetilde{\alpha_1}=\alpha_1+2\alpha_2$
$\widetilde{\alpha_2}=3\alpha_1+4\alpha_2$
则:即为基的变换矩阵。
两边分别代入$\widetilde{\alpha}$和$\widetilde{\beta}$得到,
\[T(\alpha) \cdot P = T(\alpha \cdot P)=\beta \cdot Q \cdot A_{\widetilde{\alpha},\widetilde{\beta}}(T)\]与式(3)比较我们得到矩阵变换公式:
\[Q \cdot A_{\widetilde{\alpha},\widetilde{\beta}}(T) \cdot P^{-1}=A_{\alpha,\beta}(T) \tag{5}\]3.线性回归
线性回归模型:
\[X \cdot \beta =Y \tag{6}\]👉代数解法:
一般来讲,样本个数大于自变量参数个数。所以方程个数大于这个方程的未知数个数,于是方程通常是没有解,长方形矩阵也一定没有逆矩阵。但是如果$X^T X$是可逆矩阵(一般是满足的),那么代数上可以用如下方法求一个近似的解答:
\[X^T X \cdot \beta = X^T Y\] \[\beta = (X^T X) ^ {-1} X^T Y \tag{7}\]所以如若式(6)有解,就一定是式(7)。而如果式(6)没有解,式(7)也是一个合理的估计。
👉最小二乘法:【机器学习基础】第六课:线性回归。
\[\begin{bmatrix} A & B \\ C & D \\ \end{bmatrix} ^ {-1} = \frac{1}{AD-BC} \begin{bmatrix} D & -B \\ -C & A \\ \end{bmatrix}\]
