本文为原创文章,未经本人允许,禁止转载。转载请注明出处。
1.INTRODUCTION
边界追踪(border following)是二值图像处理的一个基本技术。本文提出了一种具有拓扑分析能力(topological analysis capability)的边界追踪算法。边界分为两种类型:外边界(the outer borders)和洞边界(the hole borders)。
2.BASIC CONCEPT AND NOTATIONS
本文只考虑二值图像。
图像最上、最下、最左、最右的四条边共同组成frame。像素值为0的点记为0-pixel,像素值为1的点记为1-pixel。为了不失一般性,我们假定构成frame的均为0-pixel。我们还假定在处理过程中,可以为像素点赋予任何整数值。像素点坐标用$(i,j)$表示。其中,i为行,j为列,i的排序从最上到最下,j的排序从最左到最右。点$(i,j)$处的像素值为$f_{i,j}$,所以一幅图像可以表示为像素点的集合:$F=\{ f_{i,j} \}$。
0-pixel连接而成的区域称为0-component,1-pixel连接而成的区域称为1-component。如果某一0-component包含frame,则我们称该0-component为背景(background),否则称该0-component为洞(hole)。
为了避免拓扑矛盾,如果1-pixel考虑4邻域,则0-pixel考虑8邻域;相反,如果1-pixel考虑8邻域,则0-pixel考虑4邻域。
【定义1(边界点)】:如果某一1-pixel的8邻域(或4邻域)内有一个为0-pixel,则称该1-pixel为边界点(border point),即0-component和1-component的边界点。
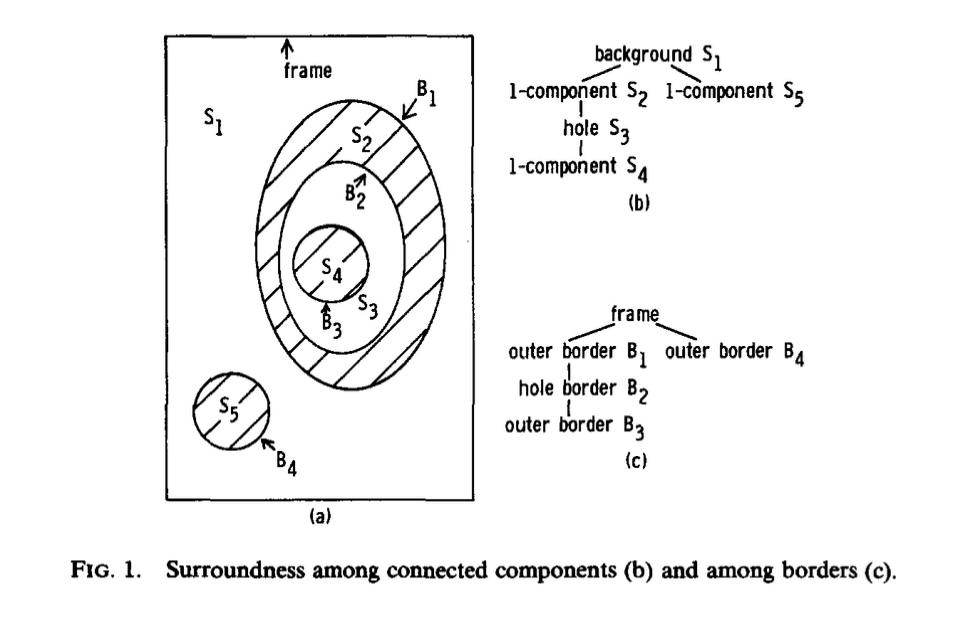
【定义2(相邻component的包围性)】:对于一幅二值图像的两个相邻component(two connected components):$S_1$和$S_2$,如果$S_1$中任何一个像素点从任何一个方向(共考虑4个方向)到达frame的路径上都存在$S_2$的像素点,则称$S_2$包围了$S_1$。如果$S_2$包围了$S_1$,且$S_1$和$S_2$之间存在边界点(见定义1),则称$S_2$直接包围了$S_1$。
【定义3(外边界和洞边界)】:如果0-component直接包围1-component,则称二者之间的边界为外边界(outer border);如果1-component直接包围了洞(即非背景的0-component),则称二者之间的边界为洞边界(hole border)。需要注意的是,不管是外边界还是洞边界,指的都是1-pixel(见定义1)。
以下属性适用于相邻的component和边界:
【性质1】对于任意的1-component,其外边界有且仅有一个;对于任意的洞,其洞边界有且仅有一个。
【定义4(父边界)】:外边界(假设0-component为$S_2$,其直接包围的1-component为$S_1$)的父边界定义如下:
- 如果$S_2$为一个洞,则外边界的父边界定义为$S_2$的洞边界。
- 如果$S_2$是背景,则外边界的父边界定义为frame。
假设有洞$S_3$和1-component $S_4$,且$S_4$直接包围$S_3$,此时形成的洞边界的父边界定义为$S_4$和直接包围$S_4$的0-component之间的外边界。
【定义5(边界的包围性)】:如果存在一系列边界$B_0,B_1,…,B_n$,对于任意k($1\leqslant k \leqslant n$),都有$B_k$是$B_{k-1}$的父边界,则称边界$B_n$包围了边界$B_0$。
以上定义的图示举例:
3.THE BORDER FOLLOWING ALGORITHM FOR TOPOLOGICAL ANALYSIS
首先,我们给出了该算法的非正式解释。
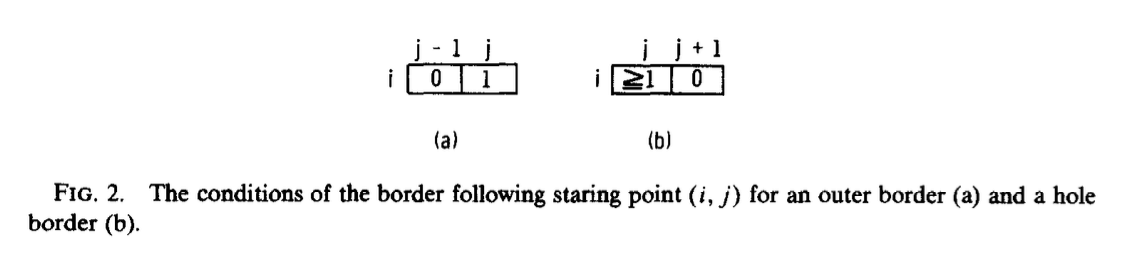
【算法1】对给定的二值图像进行光栅扫描(raster scan),寻找外边界或洞边界的起始点。外边界的起始点定义见Fig2(a),洞边界的起始点定义见Fig2(b)。如果某一像素点$(i,j)$即满足外边界起始点又满足洞边界起始点,则将其视为外边界起始点。此外,为新找到的边界指定一个唯一可识别的编号,称之为边界的序号,并用NBD表示。
光栅扫描:是指从左往右,由上往下,先扫描完一行,再移至下一行起始位置继续扫描。
NBD:the sequential number of the current border。
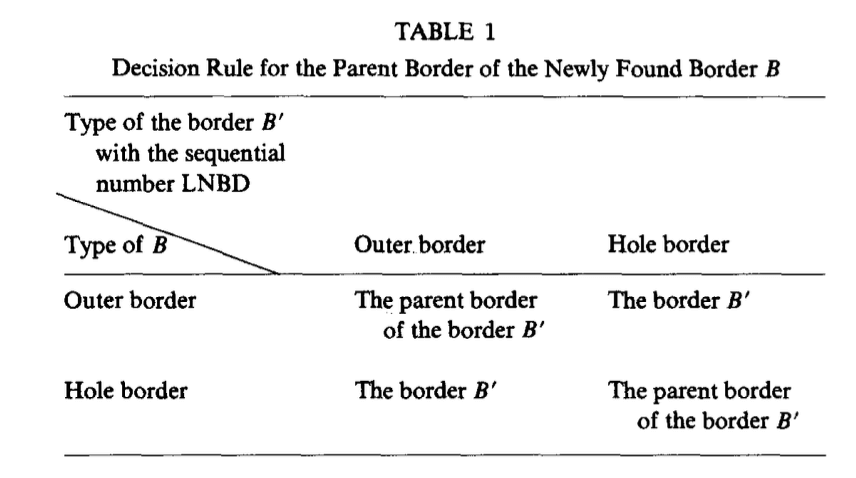
接下来确定新找到的边界的父边界。假设LNBD为找到该新边界之前上一个找到的边界的序号。序号为LNBD的边界要么是当前边界的父边界,要么和当前边界有着同一父边界:
一些标记的规则:
(a)如果当前边界位于0-component(包含像素点$(p,q+1)$)和1-component(包含像素点$(p,q)$)之间,则将像素点$(p,q)$的序号取负数,即为-NBD(即一个外边界最右边的像素点被标记成-NBD)。
(b)否则,像素点$(p,q)$的序号依然为NBD,除非像素点在一个已经跟踪过的边界上。
规则(a)和规则(b)确保了像素点$(p,q)$不会再次成为另一个洞边界或外边界的起始点。
当找到并标记完一个边界后,从头开始光栅扫描,直到光栅扫描可以走到最后(即图片的右下角)时,算法结束。
算法的详细说明见APPENDIX I。
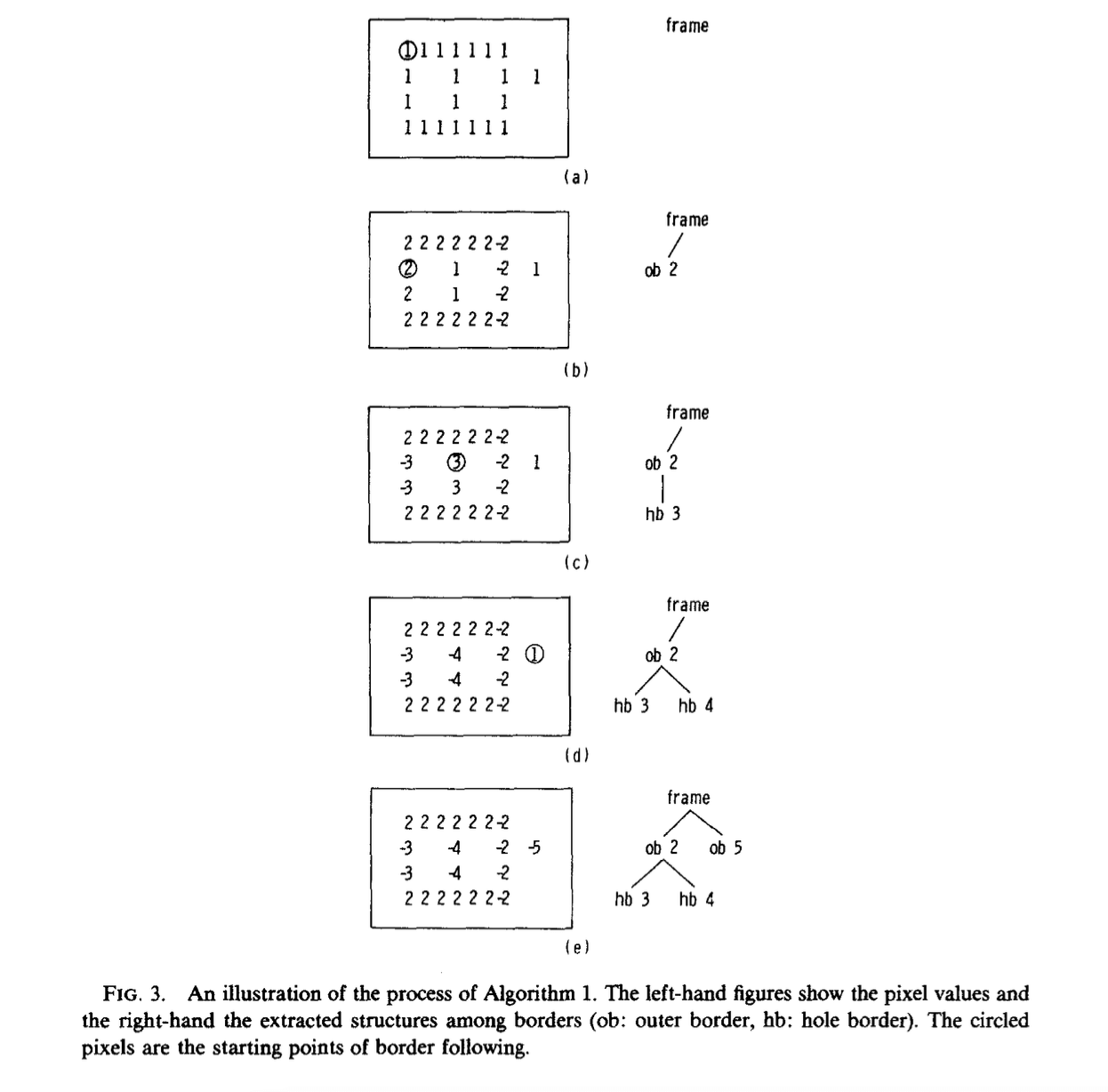
接下来尝试推导一下Fig3所示的流程。假设有二值图像:
\[\begin{bmatrix} 0 & 0 &0 &0 &0 &0 &0 &0 &0 &0 &0 &0 \\ 0 & 0 & 1 & 1 & 1 & 1 & 1 & 1 & 1 & 0 & 0 & 0 \\ 0& 0& 1& 0& 0& 1& 0& 0& 1& 0& 1& 0 \\ 0& 0& 1& 0& 0& 1& 0& 0& 1& 0& 0& 0 \\ 0 & 0 & 1 & 1 & 1 & 1 & 1 & 1 & 1 & 0 & 0 & 0 \\ 0 & 0 &0 &0 &0 &0 &0 &0 &0 &0 &0 &0 \end{bmatrix}\]最外围一圈为frame,NBD=1。从(0,0)开始光栅扫描。
- $(i,j) \leftarrow (1,2)$为外边界起始点。NBD=2。$(i_2,j_2) \leftarrow (1,1)$。
- 以(1,2)为中心,从(1,1)开始顺时针寻找(假设1-pixel考虑8邻域,0-pixel考虑4邻域)非0像素点,找到(1,3)。$(i_1,j_1) \leftarrow (1,3)$。
- $(i_2,j_2) \leftarrow (i_1,j_1)$,即(1,3)。$(i_3,j_3) \leftarrow (i,j)$,即(1,2)。
- 以(1,2)为中心,从(0,3)(即(1,3)的下一个像素点开始)开始逆时针寻找非0的像素点,找到(2,2)。$(i_4,j_4) \leftarrow (2,2)$。
-
进入第4.2步,$f_{1,2}=2$。
\[\begin{bmatrix} 0 & 0 &0 &0 &0 &0 &0 &0 &0 &0 &0 &0 \\ 0 & 0 & 2 & 1 & 1 & 1 & 1 & 1 & 1 & 0 & 0 & 0 \\ 0& 0& 1& 0& 0& 1& 0& 0& 1& 0& 1& 0 \\ 0& 0& 1& 0& 0& 1& 0& 0& 1& 0& 0& 0 \\ 0 & 0 & 1 & 1 & 1 & 1 & 1 & 1 & 1 & 0 & 0 & 0 \\ 0 & 0 &0 &0 &0 &0 &0 &0 &0 &0 &0 &0 \end{bmatrix}\] - $(i_2,j_2) \leftarrow (i_3,j_3)$,即(1,2)。$(i_3,j_3) \leftarrow (i_4,j_4)$,即(2,2)。回到第3.3步。
- 以(2,2)为中心,从(1,2)的下一个像素(1,1)开始逆时针寻找第一个非0像素点,找到(3,2)。$(i_4,j_4) \leftarrow (3,2)$。
-
进入第4.2步,修改$f_{2,2}=2$。
\[\begin{bmatrix} 0 & 0 &0 &0 &0 &0 &0 &0 &0 &0 &0 &0 \\ 0 & 0 & 2 & 1 & 1 & 1 & 1 & 1 & 1 & 0 & 0 & 0 \\ 0& 0& 2& 0& 0& 1& 0& 0& 1& 0& 1& 0 \\ 0& 0& 1& 0& 0& 1& 0& 0& 1& 0& 0& 0 \\ 0 & 0 & 1 & 1 & 1 & 1 & 1 & 1 & 1 & 0 & 0 & 0 \\ 0 & 0 &0 &0 &0 &0 &0 &0 &0 &0 &0 &0 \end{bmatrix}\] - $(i_2,j_2) \leftarrow (i_3,j_3)$,即(2,2)。$(i_3,j_3) \leftarrow (i_4,j_4)$,即(3,2)。回到第3.3步。
后续的步骤与上述类似,不再赘述。以下属性显示了算法1的有效性。
【性质3】对于任意1-component $S_1$,其最上面一行最左侧的像素点$(i,j)$一定符合Fig2(a)。从$(i,j)$开始找到的边界为外边界,且仅会被找到一次(不会被重复找到)。
证明见原文Appendix II,本博客不再详述。
【性质4】洞$S_1$最上面一行最左侧的像素点$(i,j+1)$(和像素点$(i,j)$)一定符合Fig2(b)。根据Fig2(b)找到的一定是洞边界,且每个洞边界也只会被找到一次。
证明类似于性质3的证明,不再赘述。
【性质5】算法1的边界起始点和1-components或者洞一一对应。
此性质可由性质3和性质4直接推导出。
【性质6】即Table1。
证明见原文Appendix III,本博客不再详述。
本算法的优势:
- 我们不但能找到1-components和holes,我们还能统计出其各自的数量。
- 我们可以将1-components或holes视为单独的一个像素点。
- 此外我们还可以对边界的特征进行一些限制。例如,限制1-components所在矩形框的面积必须大于某一特定的阈值。
- 该算法所得到的相邻component的包围性可用于图像搜索或图像特征提取。
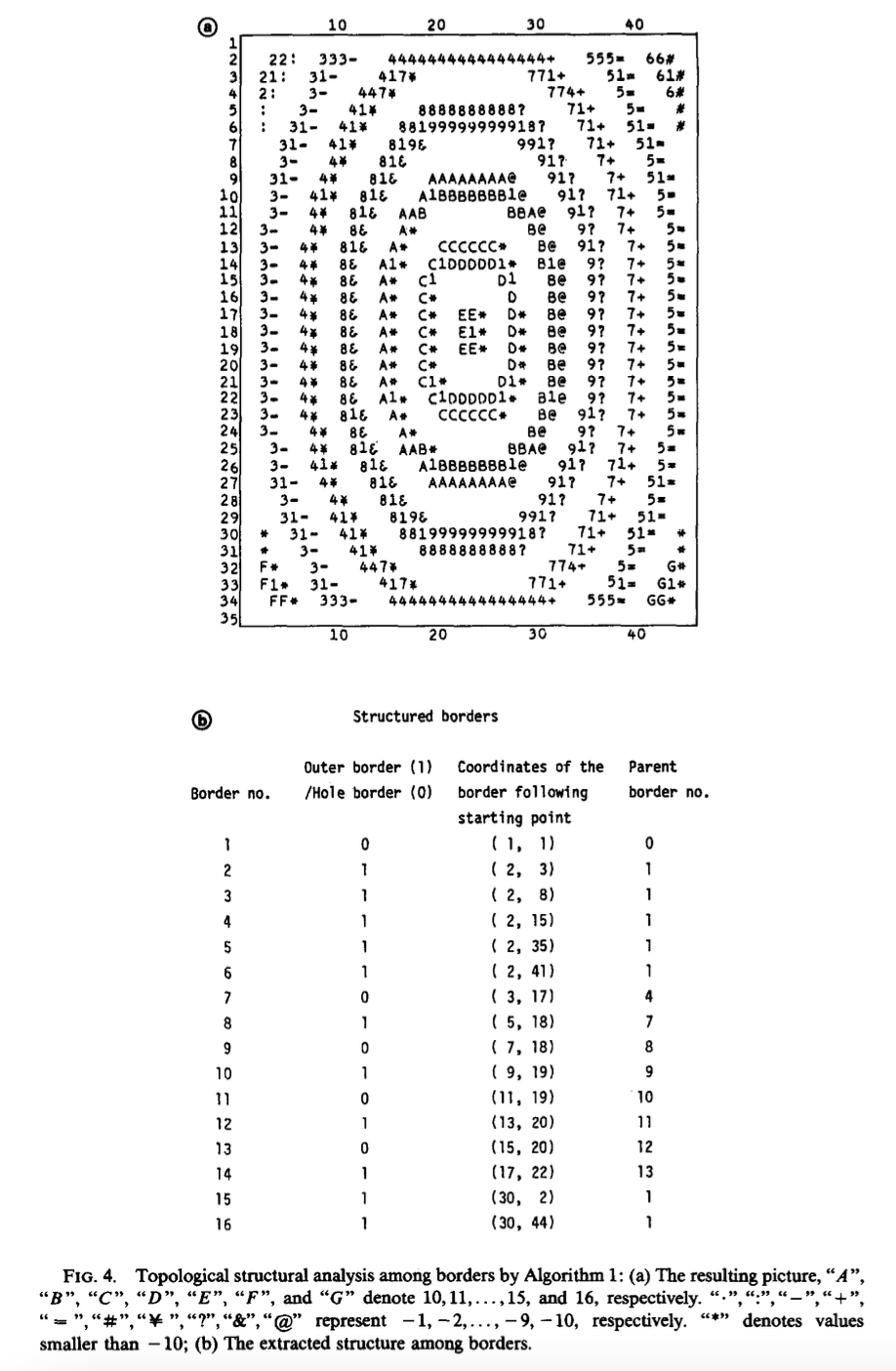
- 由算法1得到的边界可以是一种有效的图像存储方法。因为其可以在不恢复原始图像的情况下执行一些简单的图像处理。例如,获取边界的特征(比如components的周长和面积)和分析拓扑结构(比如components的相邻关系)等。
由算法1得到的边界间的拓扑结构表示见Fig4:
4.THE BORDER FOLLOWING ALGORITHM FOR EXTRACTING ONLY THE OUTERMOST BORDERS
我们可以对算法1进行修改,使其只提取二值图像的最外层边界(the outermost borders)。最外层边界指的是背景和1-component之间的外边界。
【算法2】这里我们只列出与算法1不同的地方。(1)我们只从外边界的起始点(即Fig2(a))开始边界追踪,并且有$LNBD \leqslant 0$。(2)标记策略和算法1基本相同,唯一的不同是数值”2”和”-2”分别用”NBD”和”-NBD”代替。(个人理解:每次更新NBD时,都会同步替换之前值为2或-2的点)(3)在光栅扫描过程中,我们会保存最新遇到的非0像素点的LNBD的值。每当我们开始新的一行的扫描时,重置LNBD为0。
算法2的原理解释如下。最外层边界的父边界为frame。当边界点$(i,j)$满足以下两种情况中的一个时,其为最外层边界:
- $(i,1),(i,2),…,(i,j-1)$均为0-pixel。
- $(i,h)$为光栅扫描最新遇到的外边界点,且$(i,h+1)$属于背景。
情况1和情况2可分别通过LNBD=0和LNBD=-2来检查。
【性质7】针对二值图像,算法2仅追踪最外层边界(可能不止一个,但是每个只追踪一次)。
5.CONCLUSION
对全文的总结,不再详述。
6.APPENDIX I: THE FORMAL DESCRIPTION OF ALGORITHM 1
假设输入图像为$F=\{ f_{ij} \}$,设置初始NBD=1,并将其作为frame的序号(即frame的NBD为1)。然后对图像进行光栅扫描,对于$f_{ij}\neq 0$的像素点执行以下步骤。每次开始扫描新的一行时,重置LNBD为1。
- 选择以下某一项继续:
- 如果$f_{ij}=1$且$f_{i,j-1}=0$,则像素点$(i,j)$为外边界的起始点(如Fig2(a))所示。NBD+=1。$(i_2,j_2) \leftarrow (i,j-1)$(可理解为将$(i,j-1)$赋给$(i_2,j_2)$)。
- 如果$f_{ij} \geqslant 1$且$f_{i,j+1}=0$,则像素点$(i,j)$为洞边界的起始点(如Fig2(b))所示。NBD+=1。$(i_2,j_2)\leftarrow (i,j+1)$。如果有$f_{ij}>1$,则$LNBD \leftarrow f_{ij}$。
- 其他情况,跳转至第4步。
- 根据Table1,确定第1步中新找到的边界的父边界。
- 从第1步中找到的边界起始点$(i,j)$开始,按照3.1-3.5进行边界追踪。
- 从$(i_2,j_2)$开始,以$(i,j)$为中心(4邻域或8邻域),顺时针寻找第一个不为0的像素点$(i_1,j_1)$。如果转一圈仍没有找到不为0的像素点,则$f_{ij} \leftarrow -NBD$,并且跳转到第4步。
- $(i_2,j_2) \leftarrow (i_1,j_1)$,$(i_3,j_3) \leftarrow (i,j)$。
- 以$(i_3,j_3)$为中心,按照逆时针方向,从$(i_2,j_2)$的下一个像素点开始,寻找第一个不为0的像素点$(i_4,j_4)$。
- 按照以下步骤修改像素点$(i_3,j_3)$的像素值$f_{i_3,j_3}$:
- 如果在第3.3步中,在逆时针转圈的过程中,已经检查过像素点$(i_3,j_3+1)$,且其像素值为0,则$f_{i_3,j_3} \leftarrow -NBD$。
- 如果像素点$(i_3,j_3+1)$没有在第3.3步中检查过或在第3.3步检查过但其像素值不是0(即不是第3.3步中检查过的0像素点),并且有$f_{i_3,j_3}=1$,则$f_{i_3,j_3} \leftarrow NBD$。
- 其他情况不修改$f_{i_3,j_3}$的值。
- 如果有$(i_4,j_4)=(i,j)$且$(i_3,j_3)=(i_1,j_1)$,则跳转到第4步。否则,$(i_2,j_2) \leftarrow (i_3,j_3),(i_3,j_3) \leftarrow (i_4,j_4)$,并回到第3.3步。
- 如果$f_{ij} \neq 1$,则执行$LNBD \leftarrow \lvert f_{ij} \rvert$,然后从$(i,j+1)$继续光栅扫描。当光栅扫描达到右下角时停止算法。
NBD并不是每次都赋给$f_{ij}$,参照算法流程,只有执行$f_{ij} \leftarrow NBD$时才把NBD赋值给$f_{ij}$。
7.原文链接
👽Topological Structural Analysis of Digitized Binary Images by Border Following
