本文为原创文章,未经本人允许,禁止转载。转载请注明出处。
1.Introduction
源码:YOLOX。
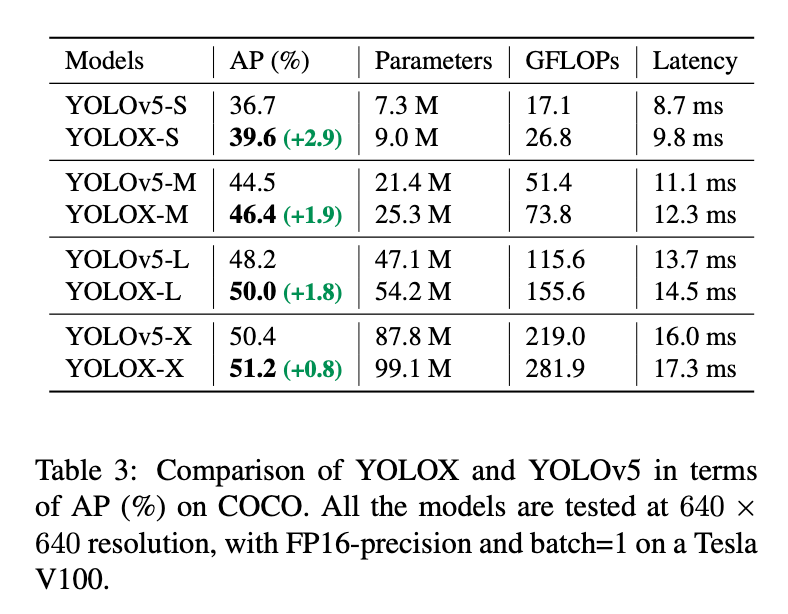
随着目标检测的发展,YOLO系列(YOLOv1、YOLOv2、YOLOv3、YOLOv4、YOLOv5)始终追求速度和精度之间的最佳平衡。目前,YOLOv5具有最优的平衡性能,在COCO上以13.7ms的速度达到了48.2%的AP(使用YOLOv5-L模型,输入为$640 \times 640$,推理精度为FP16,batch=1,使用V100 GPU)。
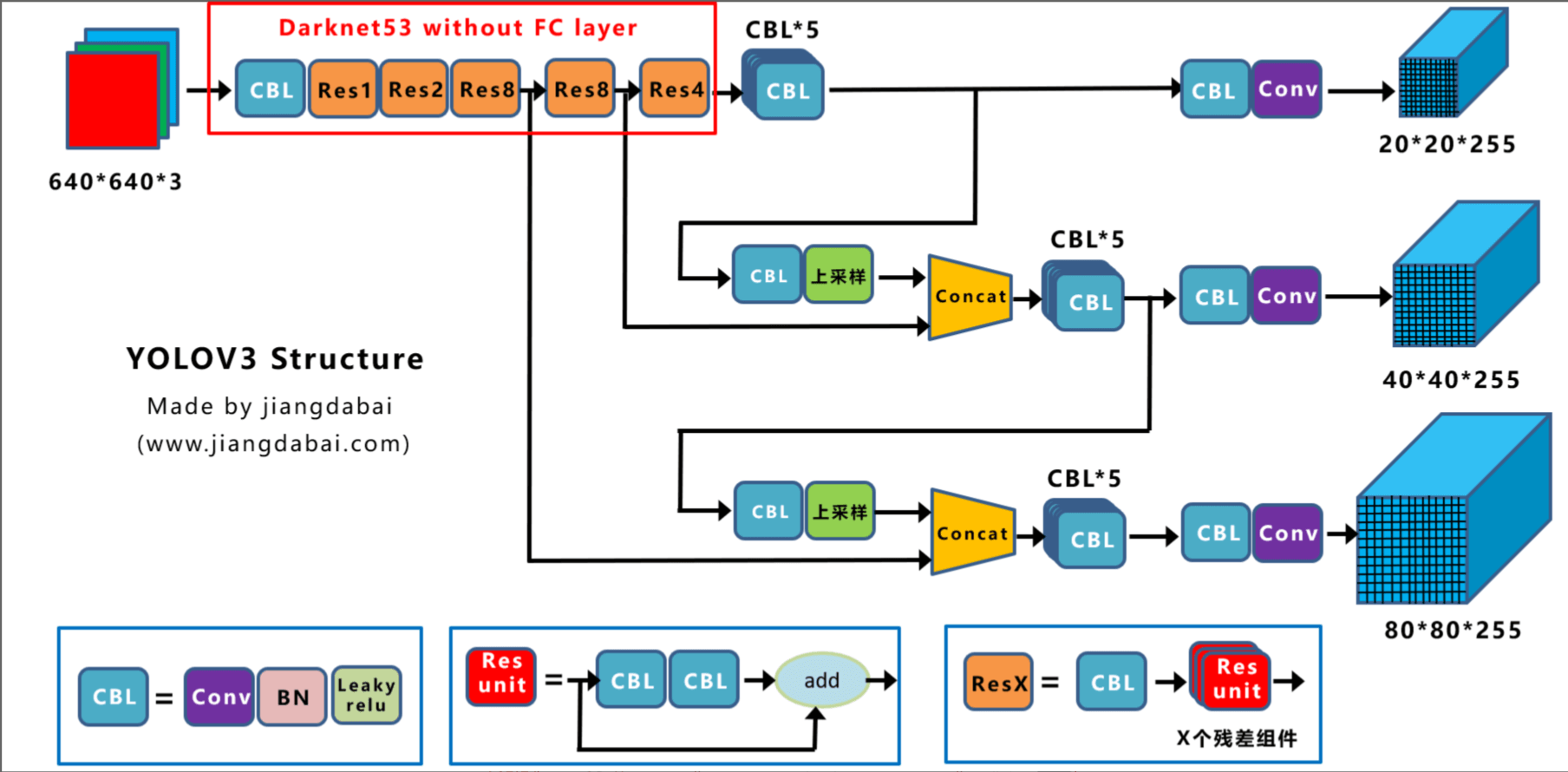
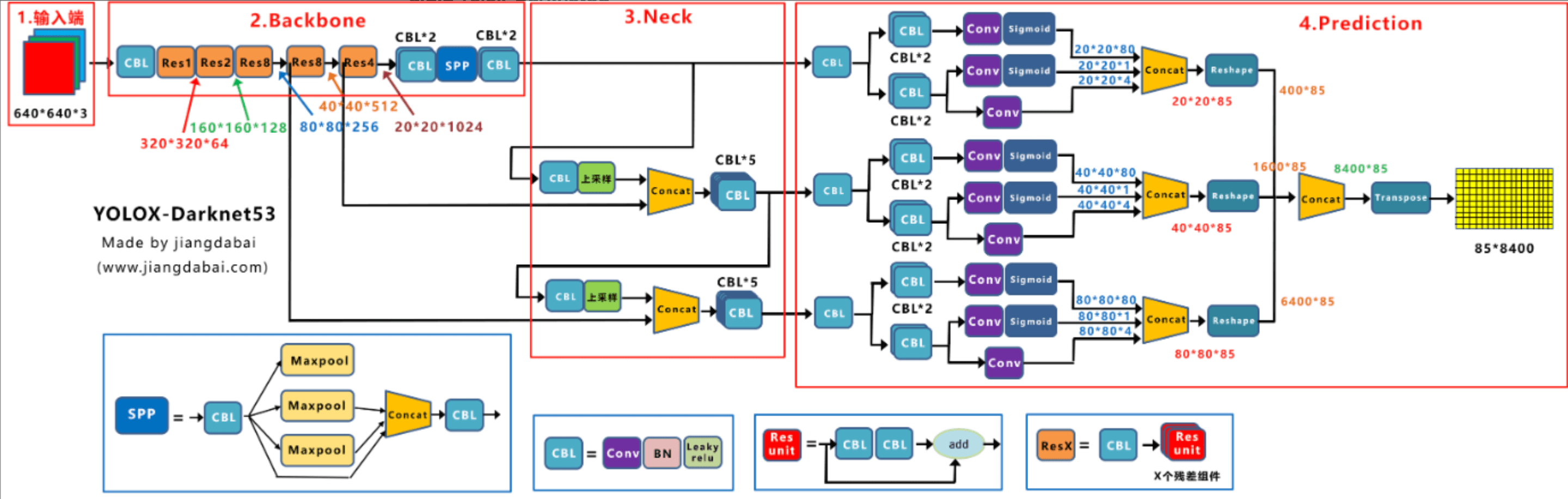
过去两年的研究大多集中在anchor-free的检测器上,但YOLOv4和YOLOv5都是anchor-based的检测器,并且可能存在优化过度的问题。因此,我们基于YOLOv3进行修改。YOLOv3的框架图:
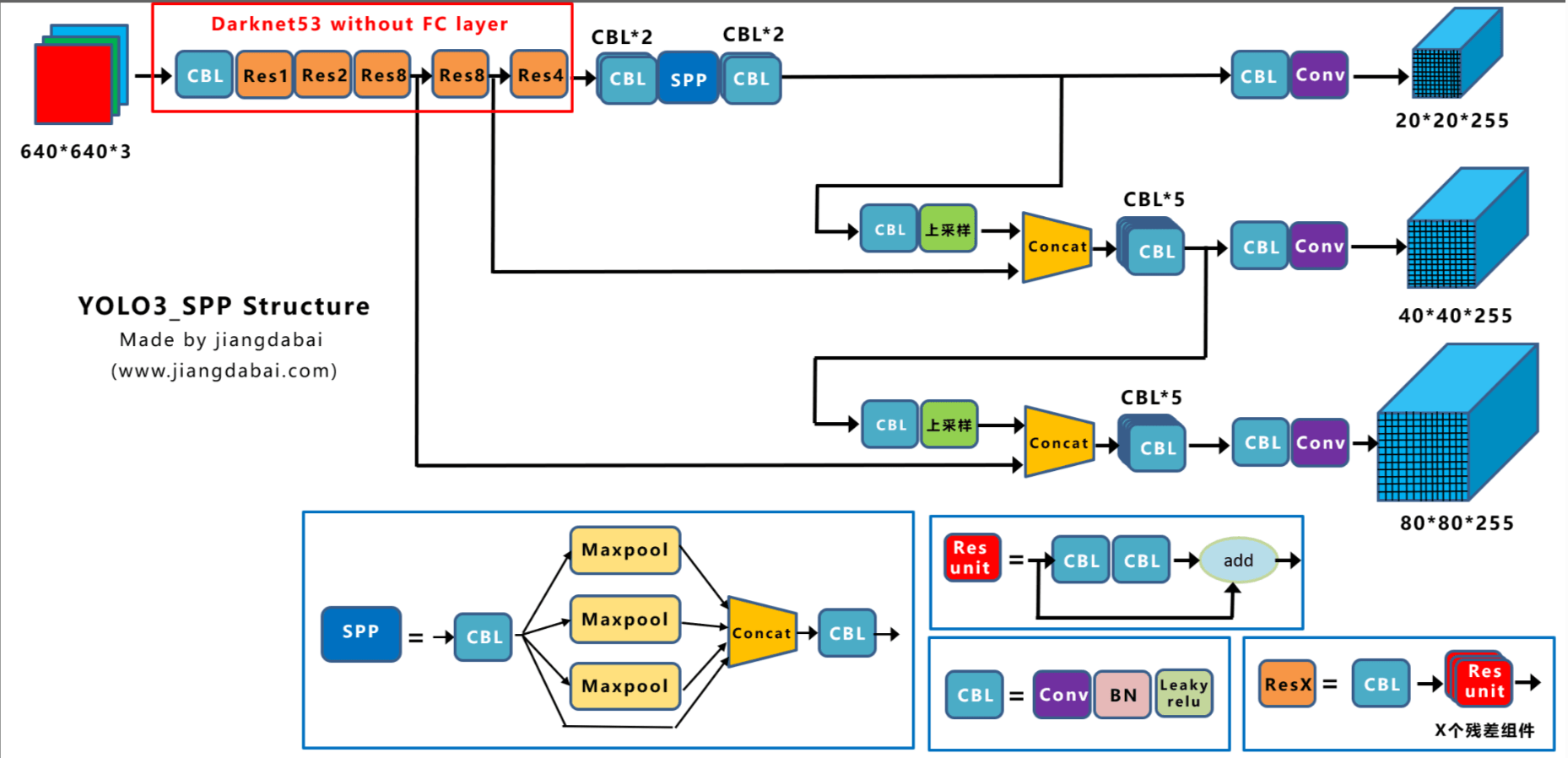
作者在YOLOv3的基础上添加了SPP结构作为基础默认模型,称为YOLOv3-SPP:
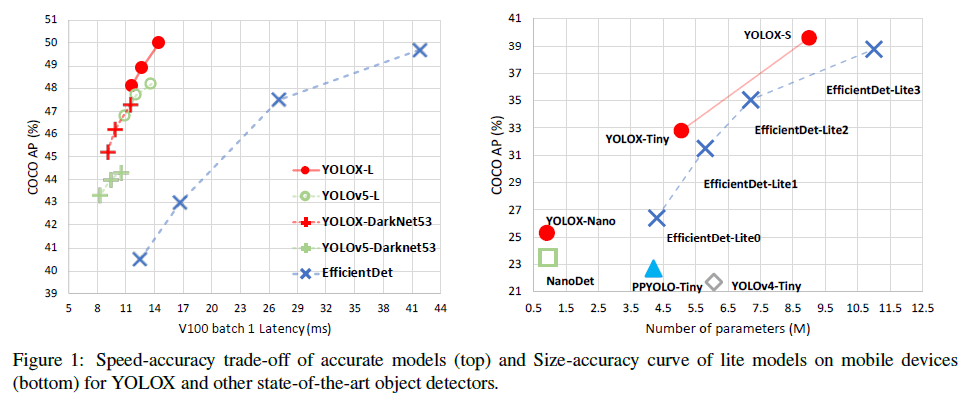
YOLOX的性能见Fig1:
值得一提的是,我们使用单个YOLOX-L模型赢得了Streaming Perception Challenge(Workshop on Autonomous Driving at CVPR 2021)的第一名。
2.YOLOX
2.1.YOLOX-DarkNet53
👉Implementation details
从baseline到final model,我们的训练设置基本一致。我们在COCO train2017上训练了300个epoch,其中5个epoch用于warmup。训练使用SGD。学习率设置$lr \times \frac{\text{BatchSize}}{64}$,其中$lr=0.01$,使用cosine lr schedule。weight decay=0.0005,SGD momentum=0.9。使用8块GPU,batch size=128。输入大小从448到832,以32的步长均匀采样。FPS和latency的测试都基于FP16精度,batch=1和单个的Tesla V100。
latency(延迟)通常指的是模型推理和后处理所需要的时间。
👉YOLOv3 baseline
使用YOLOv3-SPP作为baseline。和原始实现相比,我们修改了一些训练策略:
- EMA权重更新
- cosine lr schedule
- 使用IoU Loss训练reg分支,使用BCE Loss训练cls分支和obj分支。
此外,关于data augmentation,我们只使用了RandomHorizontalFlip、ColorJitter和multi-scale,放弃了RandomResizedCrop,因为我们发现RandomResizedCrop和mosaic augmentation有点重复了。如表2所示,我们改进的baseline在COCO val上取得了38.5%的AP。

👉Decoupled head
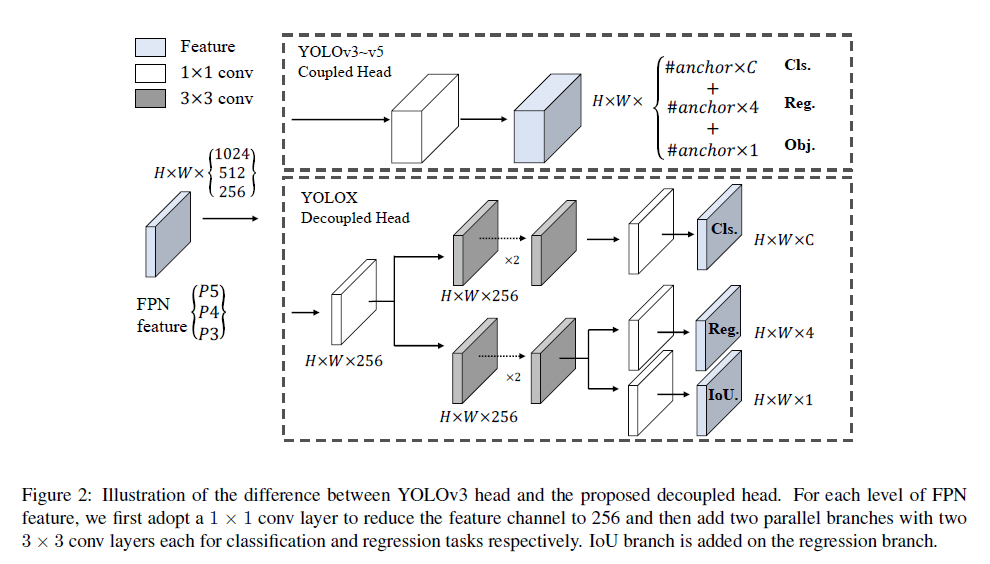
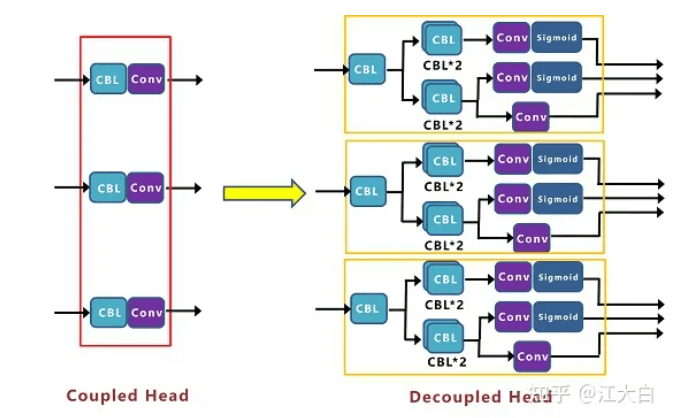
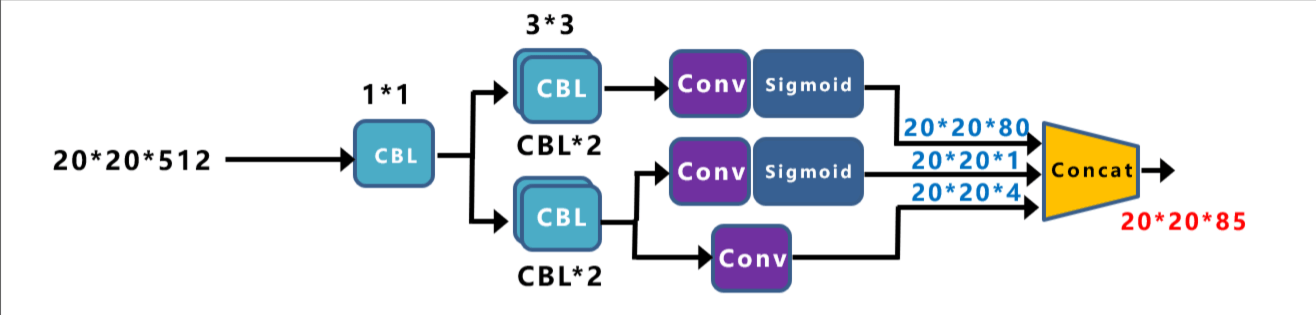
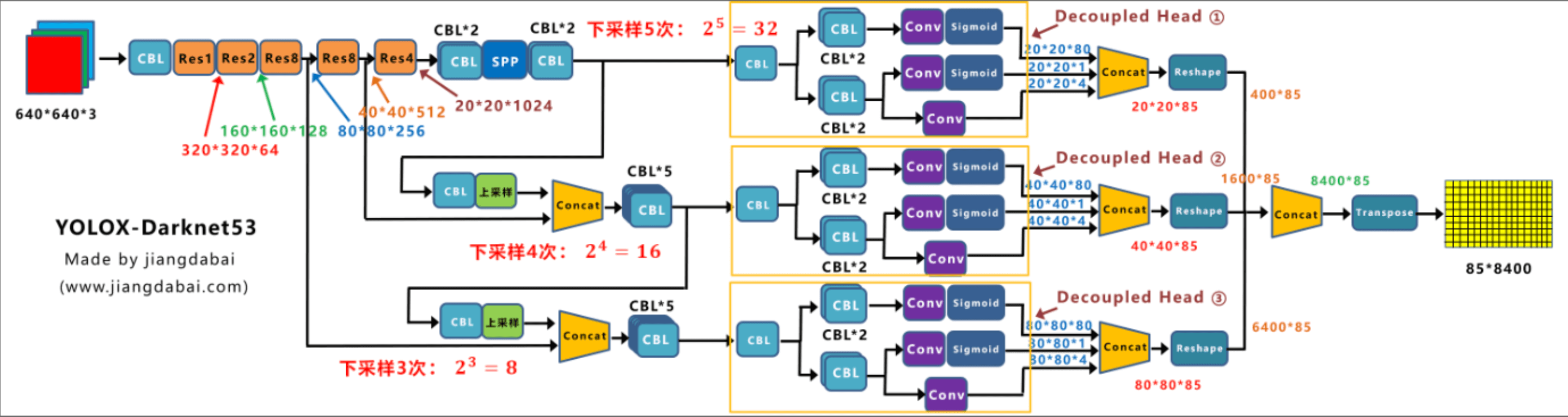
如Fig2所示,在YOLOv3-v5中,每一个预测分支(来自不同金字塔层级)都是使用一个coupled head来一起预测出cls,reg和obj。而在YOLOX中,每个预测分支(来自不同金字塔层级)使用decoupled head,一个子分支用于预测cls,另一个子分支用于预测reg和obj。下面放一张更直观的解释图:
更多细节:
我们的两个分析实验表明,coupled head可能会损害性能。
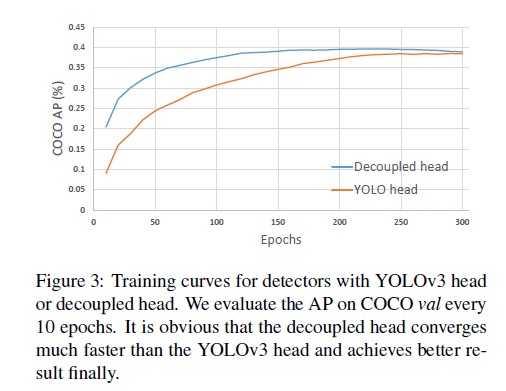
- 如Fig3所示,用decoupled head替换YOLO head大大提高了收敛速度。
- decoupled head对YOLO的端到端版本至关重要。
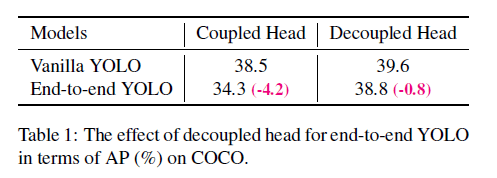
这里的端到端版本指的是没有后处理(即没有NMS)。从表1中可以看出,decoupled head可以使端到端版本性能更高(性能损失更少),并且相比coupled head,性能也更高。decoupled head模型的推理性能见表2。
👉Strong data augmentation
使用了Mosaic和MixUp。在使用了strong data augmentation之后,我们发现在ImageNet上预训练的作用不大了,因此我们的模型都是从头开始训练的。
👉Anchor-free
YOLOv3-v5都是anchor-based pipeline。但是,anchor机制存在一些问题。首先,为了实现最佳检测性能,需要在训练前通过聚类分析以确定一组最优的anchor。这些anchor是基于特定领域(特定数据集)的,泛化性不好。其次,anchor机制增加了检测头的复杂性,以及每个图像的预测数量。
最近的一些研究表明,anchor-free模型和anchor-based模型的表现不相上下。
在anchor-based的方法中,以YOLOv3-SPP为例:

如果输入图像大小为$416 \times 416$,则网络最后的三个feature map的大小为$13 \times 13, 26 \times 26, 52 \times 52$。
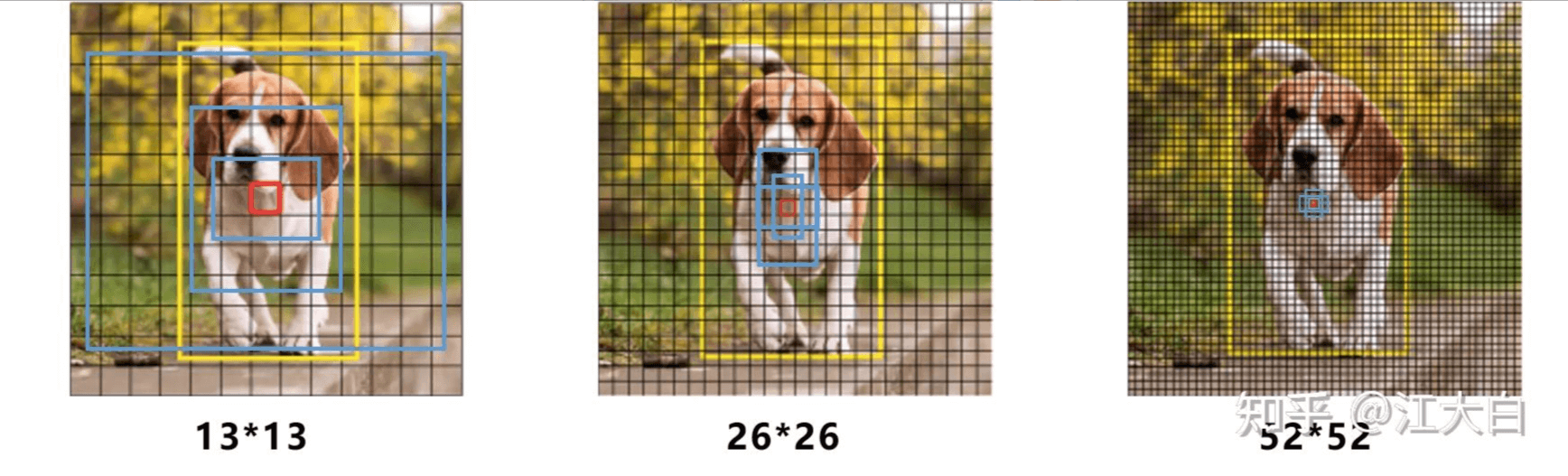
黄色框为小狗的GT,GT的中心点落在红色cell内,该cell对应的anchor用蓝色框表示。每个cell都有3个anchor。如果我们使用COCO数据集,共有80个类别,则对于每个anchor,预测结果会有85个值:bounding box的位置(4个值)、obj(前景或背景,1个值)、类别(80个值)。因此会产生$3 \times (13 \times 13+ 26 \times 26+ 52 \times 52) \times 85 = 904995$个预测结果。如果将输入从$416 \times 416$变为$640 \times 640$,最后3个feature map大小为$20 \times 20, 40 \times 40, 80 \times 80$。则会产生$3 \times (20 \times 20+ 40 \times 40+ 80 \times 80) \times 85 = 2142 000$个预测结果。
而YOLOX所采用的anchor free的方式:
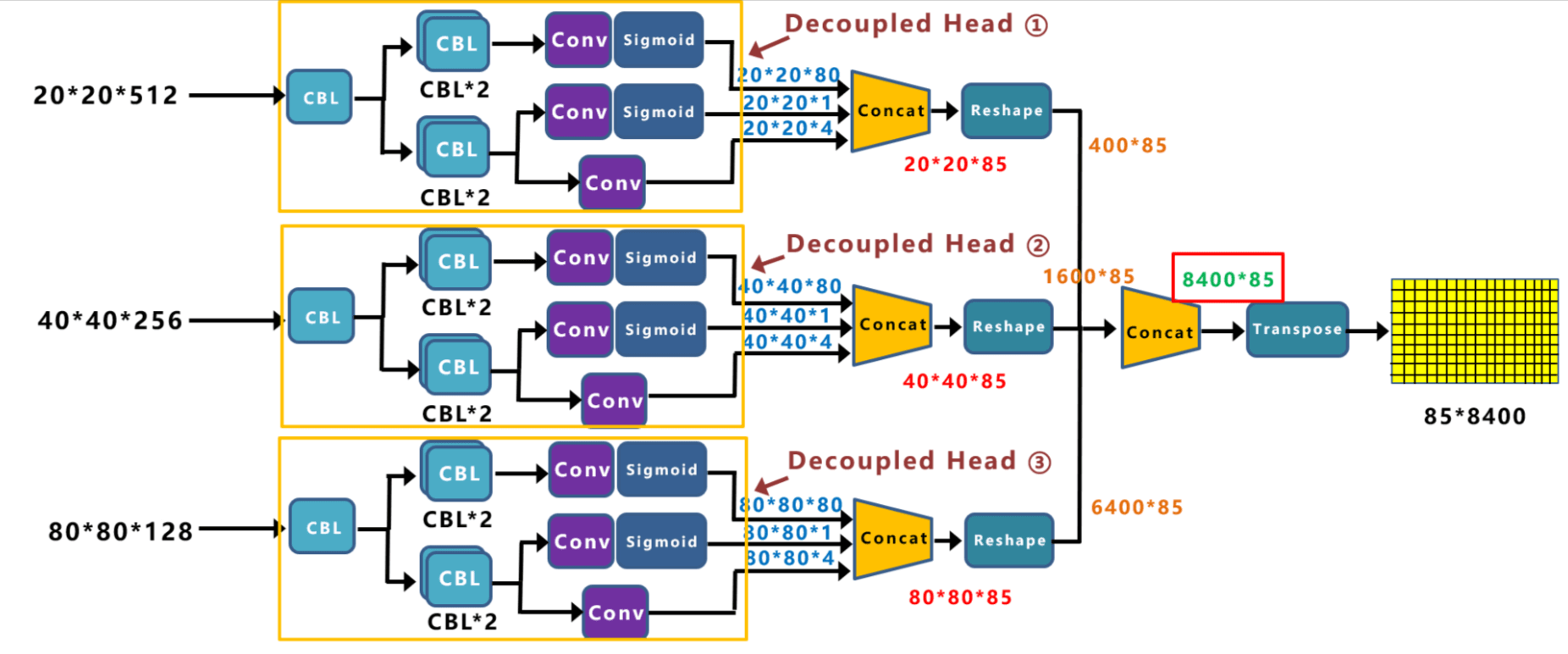
当输入为$640 \times 640$时,最终输出得到的不是feature map,而是特征向量,大小为$85 \times 8400$,相比之前anchor based方式,少了$\frac{2}{3}$的参数量。在前面anchor based方式中,feature map中的每个cell都有3个大小不一的anchor box,在YOLOX中同样也有类似的机制,其把下采样的大小信息引入进来:
8400表示cell的数量,每个cell对应一种尺度的anchor,这个anchor的大小取决于下采样:
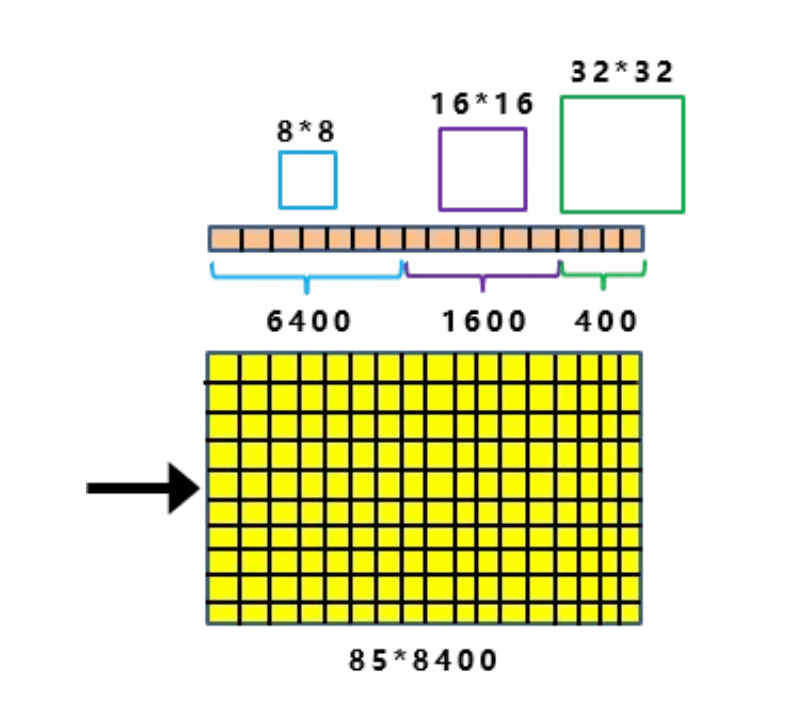
这8400个cell中,有400个(来自$20 \times 20$)cell对应的anchor大小为$32 \times 32$,有1600个(来自$40 \times 40$)cell对应的anchor大小为$16 \times 16$,有6400个(来自$80 \times 80$)cell对应的anchor大小为$8 \times 8$。
个人理解:因为YOLOX的anchor都是正方形,所以对于瘦长形的目标,比如行人,检测效果可能不如YOLOv5。
👉Multi positives
如果和YOLOv3一样,针对上述anchor-free版本的模型,只把GT中心点所在cell的anchor视为正样本,那么就会忽视周边一些高质量的预测,这些预测其实也是有用的,因此我们将GT中心点所在cell及其$3 \times 3$范围内cell的所有anchor都视为正样本(这一技术在FCOS中被称为”center sampling”)。如表2所示,这一修改带来了性能的提升。
$3 \times 3$这个范围对于不同目标可能是不同的,比如对于有的目标,范围是$5 \times 5$。
👉SimOTA
OTA(Optimal Transport Assignment)是旷视科技提出的一种动态样本匹配算法(YOLOX也是旷视科技同年提出的)。所谓的样本匹配就是在训练前,我们需要将样本标记好标签,比如有些anchor box被标记为正样本,有些anchor box被标记为负样本。而动态样本匹配就是在训练过程中,样本的标签是动态变化的,比如同一个anchor box在上一轮训练中被标记为正样本,在下一轮训练中就有可能被标记为负样本。
OTA论文:Zheng Ge, Songtao Liu, Zeming Li, Osamu Yoshie, and Jian Sun. Ota: Optimal transport assignment for object detection. In CVPR, 2021.。
在我们的认知中,样本匹配有4个因素十分重要(以下来自旷视科技在知乎上的回答,详见参考资料3):
- loss/quality/prediction aware:基于网络自身的预测来计算anchor box或者anchor point与gt的匹配关系,充分考虑到了不同结构/复杂度的模型可能会有不同行为,是一种真正的dynamic样本匹配。而loss aware后续也被发现对于DeTR和DeFCN这类端到端检测器至关重要。与之相对的,基于IoU阈值/in Grid (YOLOv1)/in Box or Center (FCOS)都属于依赖人为定义的几何先验做样本匹配,目前来看都属于次优方案。
- center prior:考虑到感受野的问题,以及大部分场景下,目标的质心都与目标的几何中心有一定的联系,将正样本限定在目标中心的一定区域内做loss/quality aware样本匹配能很好地解决收敛不稳定的问题。
- 不同目标设定不同的正样本数量(dynamic k):我们不可能为同一场景下的西瓜和蚂蚁分配同样的正样本数,如果真是那样,那要么蚂蚁有很多低质量的正样本,要么西瓜仅仅只有一两个正样本。dynamic k的关键在于如何确定k,有些方法通过其他方式间接实现了动态k,比如ATSS、PAA,甚至RetinaNet,同时,k的估计依然可以是prediction aware的,我们具体的做法是首先计算每个目标最接近的10个预测,然后把这10个预测与gt的IoU加起来求得最终的k,很简单有效,对10这个数字也不是很敏感,在5~15调整几乎没有影响。
- 全局信息:有些anchor box/point处于正样本之间的交界处,或者正负样本之间的交界处,这类anchor box/point的正负划分,甚至若为正,该是谁的正样本,都应充分考虑全局信息。
OTA就是满足上述4点的,一个好的样本匹配策略。但是OTA最大的问题是会增加约20%-25%的额外训练时间,这对于动辄300 epoch的COCO训练来说是有些吃不消的,因此我们去掉了OTA里的最优方案求解过程(即去掉了Sinkhorn-Knopp算法),保留上面4点的前3点,简而言之:loss aware dynamic top k,我们将其称为SimOTA(Simplified OTA)。接下来我们来详细介绍下SimOTA算法。
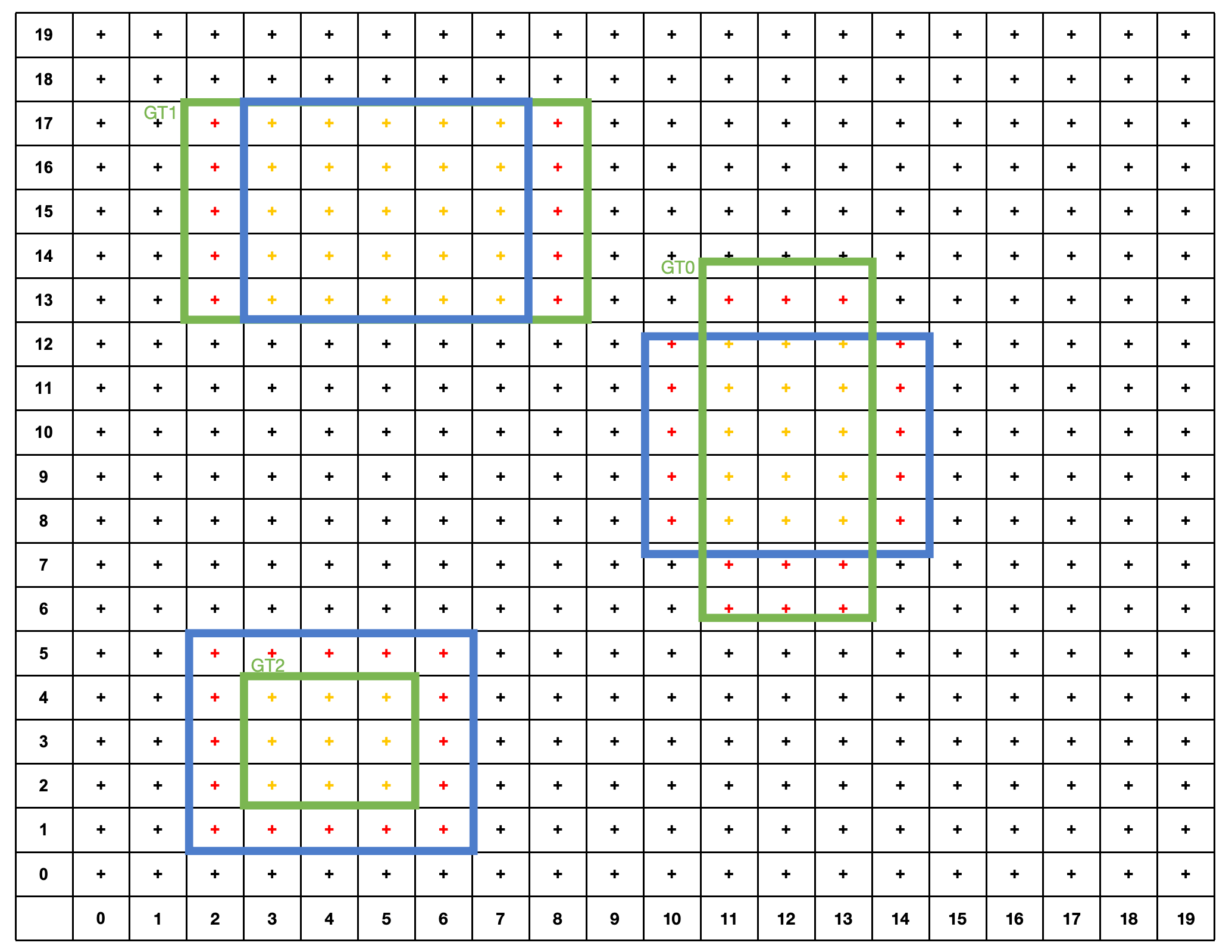
如上图所示,假设我们的图像大小为$20 \times 20$,有3个GT(绿色框)。对于每个GT,按照其中心,取一个边长为$n$的fixed center area,如上图所示,我们用蓝色框表示这个区域,我们取$n=5$。一共有94个anchor point落在了GT和fixed center area的并集中,我们计算这些anchor point和每一个GT的IoU,得到如下IoU矩阵:

类似的,计算这些anchor point和每一个GT的cost,得到如下cost矩阵:

其中,GT $g_i$和anchor point $p_j$(即预测得到的bounding box)之间的cost的计算方式为:
\[c_{ij} = L_{ij}^{cls} + \lambda L_{ij}^{reg} \tag{1}\]其中,$L_{ij}^{cls}$是$g_i$和$p_j$之间的分类loss,而$L_{ij}^{reg}$是$g_i$和$p_j$之间的回归loss。
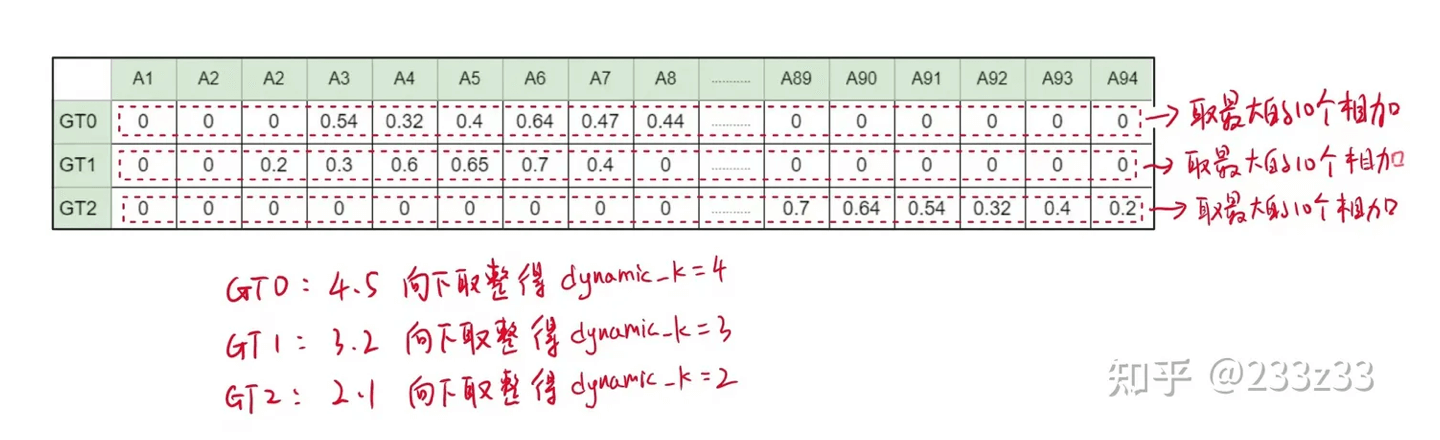
接下来说下dynamic k的确定。在IoU矩阵中,对于每一个GT,我们取最大的10个IoU求和,然后取整得到dynamic k。
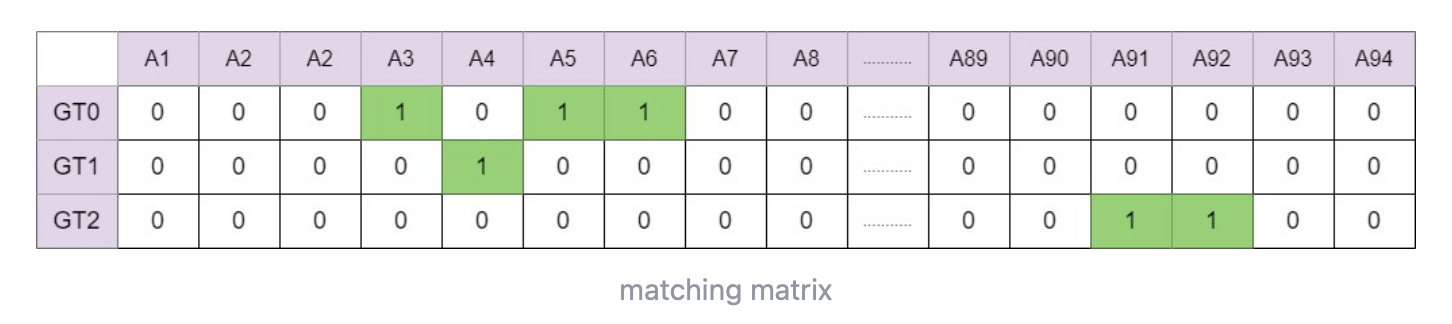
每个GT,根据自己的dynamic k,找到cost最小的k个anchor point作为自己的正样本:

一个anchor point只能作为一个GT的正样本,但是上图中,A4同时是GT0和GT1的正样本,此时我们会匹配cost更小的一对,所以A4最终和GT1匹配,最终匹配结果见下:
SimOTA对性能的提升见表2。
👉End-to-end YOLO
我们按照论文“Qiang Zhou, Chaohui Yu, Chunhua Shen, Zhibin Wang, and Hao Li. Object detection made simpler by eliminating heuristic nms. arXiv preprint arXiv:2101.11782, 2021.”,添加了两个额外的卷积层,一对一的标签分配和停止梯度。这些修改使得检测器能够以端到端的方式执行,但这略微降低了性能和推理速度,见表2。因此,我们将其作为一个可选模块,在最终模型中并没有使用。
2.2.Other Backbones
除了DarkNet53,我们还测试了其他backbone,YOLOX框架的性能都比对应的counterparts要好。
👉Modified CSPNet in YOLOv5
为了公平比较,我们采用了YOLOv5的backbone,包含修改后的CSPNet、SiLU激活函数和PAN head。
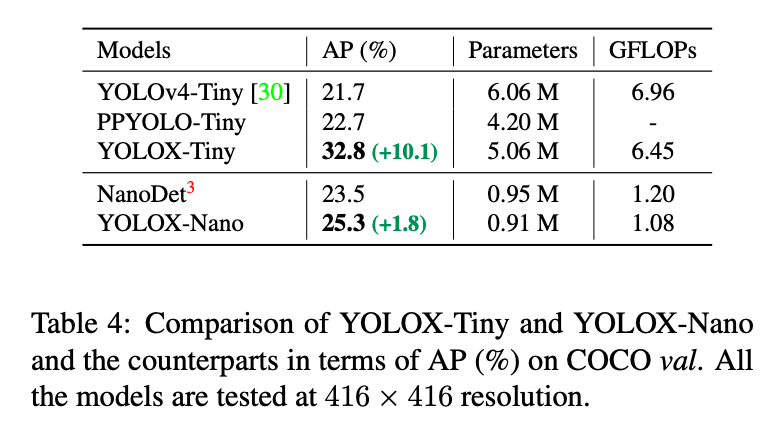
👉Tiny and Nano detectors
我们进一步将我们的模型缩小为YOLOX-Tiny,并和YOLOv4-Tiny进行了比较。对于移动设备,我们采用depth-wise卷积来构建YOLOX-Nano模型。比较结果见表4。
👉Model size and data augmentation
在我们的实验中,几乎所有模型都使用相同的学习策略和优化参数,如第2.1部分所示。但是我们发现不同大小的模型,其适合的数据增强也不同。
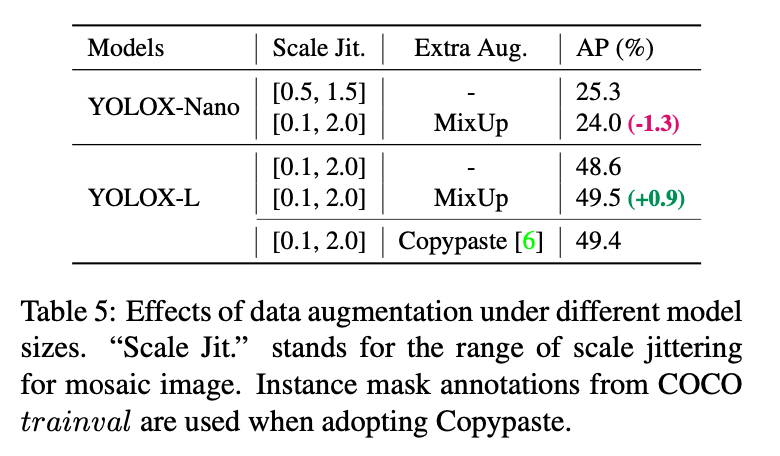
YOLOX-S、YOLOX-Tiny和YOLOX-Nano都适用于小模型的数据增强方式。
3.Comparison with the SOTA
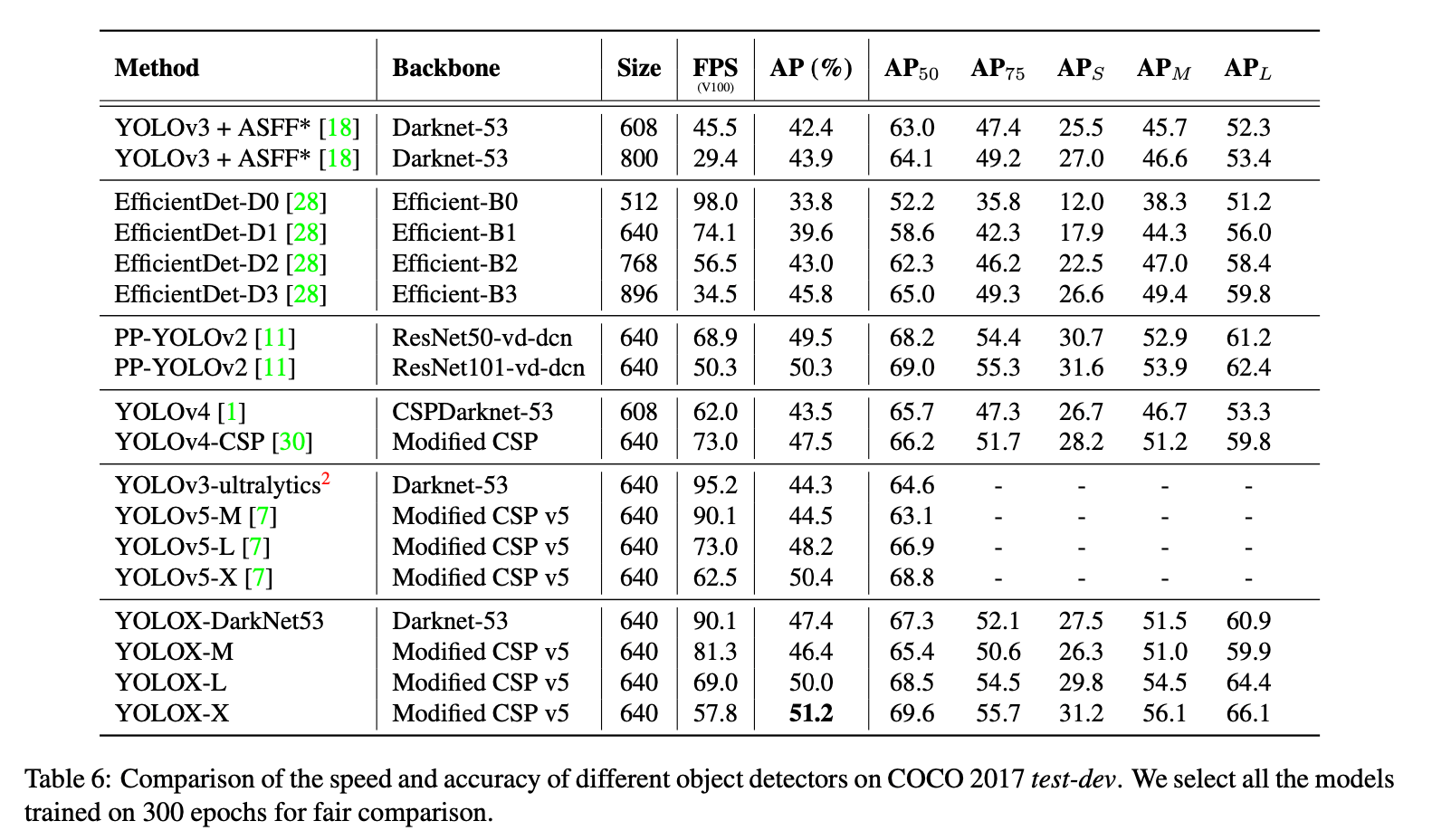
还有一些高性能的YOLO系列大模型,比如Scale-YOLOv4和YOLOv5-P6。还有最近基于Transformer的检测器,把精度提高到了~60 AP的SOTA水平。但由于时间和资源限制,我们没有和这些方法比较。
4.1st Place on Streaming Perception Challenge (WAD at CVPR 2021)
不再详述。
5.Conclusion
不再详述。
6.原文链接
👽YOLOX:Exceeding YOLO Series in 2021
