本文为原创文章,未经本人允许,禁止转载。转载请注明出处。
1.前言
OpenCV鱼眼相机模型部分所引用的论文:A Generic Camera Model and Calibration Method for Conventional, Wide-Angle, and Fish-Eye Lenses。
OpenCV官方文档(本人所用OpenCV版本为4.6.0)的描述如下。
从世界坐标系到相机坐标系的转换表示为:
\[\mathbf{X}c = \mathbf{RX}+\mathbf{T} \tag{1}\]其中,$\mathbf{R}$是旋转矩阵,$\mathbf{T}$是平移向量,$\mathbf{X}$是世界坐标系中的点。$\mathbf{X}c$是相机坐标系下的点,其$x,y,z$坐标分别表示为:
\[x = \mathbf{X}c_1 \tag{2}\] \[y = \mathbf{X}c_2 \tag{3}\] \[z = \mathbf{X}c_3 \tag{4}\]如下图所示:
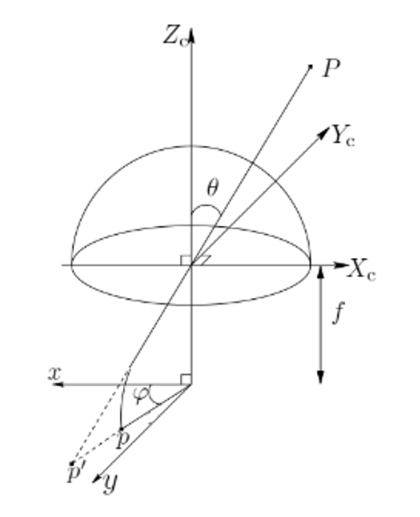
设位于相机坐标系中的点$P$的坐标为$(x,y,z)$。如果使用perspective projection模型,则点$P$在图像坐标系中的投影点为$p’$,其坐标为$(a,b)$,根据相似三角形,我们可以得到:
\[\frac{x}{a} = \frac{y}{b} = \frac{z}{f} \tag{5}\]考虑在归一化成像平面(即$f=1$时的成像平面)做畸变校正,可得:
\[a = \frac{x}{z} \cdot f = \frac{x}{z} \tag{6}\] \[b = \frac{y}{z} \cdot f = \frac{y}{z} \tag{7}\]$p’$到原点的半径$r$为:
\[r^2 = a^2 + b^2 \tag{8}\]在perspective projection模型中,入射角等于出射角,所以有:
\[\tan \theta = \frac{r}{f} = r \tag{9}\]即:
\[\theta = atan (\frac{r}{f}) = atan (r) \tag{10}\]根据论文提出的通用相机模型,点$p$到原点的半径$\theta_d$可计算为:
\[\theta_d = \theta (1 + k_1\theta^2 + k_2 \theta^4+k_3\theta^6 +k_4\theta^8) \tag{11}\]和论文中的式(6)相比,这里相当于是把$k_1$置为1了。
据此,我们可以计算点$p$的坐标$(x’,y’)$为:
\[x' = \frac{\theta_d}{r} \cdot a \tag{12}\] \[y' = \frac{\theta_d}{r} \cdot b \tag{13}\]注意,这里的$p$坐标是在图像坐标系(归一化成像平面)下,假设其对应的相机坐标系下的点为$(Xc_p,Yc_p,Zc_p)$,因为有$f=1$,所以$x’ = \frac{Xc_p}{Zc_p},y’=\frac{Yc_p}{Zc_p}$。因此$(x’,y’)$可以直接使用内参矩阵转换为像素坐标系(实际成像平面)下的点(见下面式(14)和式(15))。
最终,得到点$p$在像素坐标系下的坐标:
\[u = f_x(x'+\alpha y')+c_x \tag{14}\] \[v = f_y y' + c_y \tag{15}\]其中,$\alpha$是倾斜因子。
这里OpenCV其实用的是论文中的$\mathbf{p}_9$模型。在OpenCV中,所谓的鱼眼镜头去畸变过程就是对投影模型的转换(从点$p$纠正到点$p’$),而并没有真正做论文第2.B部分提到的畸变校正。
1.1.相机分辨率对相机内参的影响
一些题外话,如果使用不同的图像分辨率,其对应的内参矩阵也是不同的。假设在分辨率$w \times h$下,图像坐标系到像素坐标系的转换为:
\[u = f_x x' + c_x \tag{16}\] \[v = f_y y' + c_y \tag{17}\]焦距$f$的单位是mm,$dx$表示一个像素在$x$方向的长度是多少mm,所以$f_x$可以视为在$x$方向的焦距,只不过单位是像素。$f_y$同理。
如果我们将分辨率调整为$w’ \times h’$,则上述转换对应变为:
\[\frac{w'}{w}u = \frac{w'}{w} (f_x x' + c_x) \tag{18}\] \[\frac{h'}{h}v = \frac{h'}{h} (f_y y' + c_y) \tag{19}\]对应的内参矩阵调整为:
\[\begin{bmatrix} \frac{w'}{w} \cdot f_x & 0 & \frac{w'}{w} \cdot c_x \\ 0 & \frac{h'}{h} \cdot f_y & \frac{h'}{h} \cdot c_y \\ 0 & 0 & 1 \\ \end{bmatrix} \tag{20}\]2.cv::fisheye::calibrate
1
2
3
4
5
6
7
8
9
10
11
double cv::fisheye::calibrate (
InputArrayOfArrays objectPoints
InputArrayOfArrays imagePoints,
const Size& image_size,
InputOutputArray K,
InputOutputArray D,
OutputArrayOfArrays rvecs,
OutputArrayOfArrays tvecs,
int flags = 0,
TermCriteria criteria = TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 100, DBL_EPSILON)
)
参数解释:
objectPoints:世界坐标系下的点。imagePoints:像素坐标系下的点,和objectPoints中的点一一对应。image_size:图像大小,仅用于初始化相机内参矩阵。-
\[A = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix}\]K:输出的$3\times 3$浮点型的相机内参矩阵:如果设置了
fisheye::CALIB_USE_INTRINSIC_GUESS,在调用函数之前,$f_x,f_y,c_x,c_y$等值必须被指定初始化。 D:输出的畸变参数$(k_1,k_2,k_3,k_4)$,见式(11)。rvecs:对于每个校正板图像,都输出一个旋转向量(Rodrigues公式,其可以将旋转向量转换为旋转矩阵)。tvecs:对于每个校正板图像,都输出一个平移向量。flags:参数设置:fisheye::CALIB_USE_INTRINSIC_GUESS:相机矩阵中包含了$f_x,f_y,c_x,c_y$的有效初始值,这些值会被进一步优化。否则,$(c_x,c_y)$的初始值被设置为图像的中心,焦距则通过最小二乘法计算。fisheye::CALIB_RECOMPUTE_EXTRINSIC:在每次内参优化迭代之后都会重新计算外参。fisheye::CALIB_CHECK_COND:这些函数将检查条件编号的有效性。fisheye::CALIB_FIX_SKEW:倾斜因子(alpha)设为0并保持为0。fisheye::CALIB_FIX_K1,…,fisheye::CALIB_FIX_K4:将特定的畸变系数设为0并保持为0。fisheye::CALIB_FIX_PRINCIPAL_POINT:在全局优化过程中主点$(c_x,c_y)$不会改变。它会保持在图像中心或fisheye::CALIB_USE_INTRINSIC_GUESS中的预设值。fisheye::CALIB_FIX_FOCAL_LENGTH:在全局优化过程中焦距不会改变。它是$\max(width,height)/\pi$或在fisheye::CALIB_USE_INTRINSIC_GUESS中预设的$f_x,f_y$。
criteria:迭代优化算法的停止条件。
3.cv::fisheye::undistortPoints
3.1.API介绍
1
2
3
4
5
6
7
8
9
void cv::fisheye::undistortPoints (
InputArray distorted,
OutputArray undistorted,
InputArray K,
InputArray D,
InputArray R = noArray(),
InputArray P = noArray(),
TermCriteria criteria = TermCriteria(TermCriteria::MAX_ITER+TermCriteria::EPS, 10, 1e-8)
)
参数解释:
distorted:带有畸变的2D点(像素坐标系)。undistorted:去畸变后的2D点(像素坐标系)。K:内参矩阵。D:畸变系数$(k_1,k_2,k_3,k_4)$。R:校正变换。P:新的相机内参矩阵($3 \times 3$)或新的投影矩阵($3 \times 4$)。criteria:迭代优化算法的停止条件。
3.2.源码解析
首先是对参数有效性的判断:
1
2
3
4
5
6
7
8
9
10
11
CV_INSTRUMENT_REGION();
// will support only 2-channel data now for points
CV_Assert(distorted.type() == CV_32FC2 || distorted.type() == CV_64FC2);
undistorted.create(distorted.size(), distorted.type());
CV_Assert(P.empty() || P.size() == Size(3, 3) || P.size() == Size(4, 3));
CV_Assert(R.empty() || R.size() == Size(3, 3) || R.total() * R.channels() == 3);
CV_Assert(D.total() == 4 && K.size() == Size(3, 3) && (K.depth() == CV_32F || K.depth() == CV_64F));
CV_Assert(criteria.isValid());
然后读入内参矩阵和畸变系数,将$f_x,f_y$存入f,$c_x,c_y$存入c,$(k_1,k_2,k_3,k_4)$存入k:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
cv::Vec2d f, c;
if (K.depth() == CV_32F)
{
Matx33f camMat = K.getMat();
f = Vec2f(camMat(0, 0), camMat(1, 1));
c = Vec2f(camMat(0, 2), camMat(1, 2));
}
else
{
Matx33d camMat = K.getMat();
f = Vec2d(camMat(0, 0), camMat(1, 1));
c = Vec2d(camMat(0, 2), camMat(1, 2));
}
Vec4d k = D.depth() == CV_32F ? (Vec4d)*D.getMat().ptr<Vec4f>(): *D.getMat().ptr<Vec4d>();
接着读入参数R和P,并将两个矩阵的乘积存入RR(后面会解释这两个矩阵的作用):
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
cv::Matx33d RR = cv::Matx33d::eye();
if (!R.empty() && R.total() * R.channels() == 3)
{
cv::Vec3d rvec;
R.getMat().convertTo(rvec, CV_64F);
RR = cv::Affine3d(rvec).rotation();
}
else if (!R.empty() && R.size() == Size(3, 3))
R.getMat().convertTo(RR, CV_64F);
if(!P.empty())
{
cv::Matx33d PP;
P.getMat().colRange(0, 3).convertTo(PP, CV_64F);
RR = PP * RR;
}
如果点坐标是float型,则带畸变的点存到srcf,去畸变的点存到dstf;如果点坐标是double型,则带畸变的点存到srcd,去畸变的点存到dstd。n是点的个数。
1
2
3
4
5
6
7
8
// start undistorting
const cv::Vec2f* srcf = distorted.getMat().ptr<cv::Vec2f>();
const cv::Vec2d* srcd = distorted.getMat().ptr<cv::Vec2d>();
cv::Vec2f* dstf = undistorted.getMat().ptr<cv::Vec2f>();
cv::Vec2d* dstd = undistorted.getMat().ptr<cv::Vec2d>();
size_t n = distorted.total();
int sdepth = distorted.depth();
读入优化算法的终止条件:
1
2
3
4
5
6
7
const bool isEps = (criteria.type & TermCriteria::EPS) != 0;
/* Define max count for solver iterations */
int maxCount = std::numeric_limits<int>::max();
if (criteria.type & TermCriteria::MAX_ITER) {
maxCount = criteria.maxCount;
}
接下来是算法的主体部分,对每个点依次进行去畸变:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
for(size_t i = 0; i < n; i++ )
{
Vec2d pi = sdepth == CV_32F ? (Vec2d)srcf[i] : srcd[i]; // image point
Vec2d pw((pi[0] - c[0])/f[0], (pi[1] - c[1])/f[1]); // world point
double theta_d = sqrt(pw[0]*pw[0] + pw[1]*pw[1]);
// the current camera model is only valid up to 180 FOV
// for larger FOV the loop below does not converge
// clip values so we still get plausible results for super fisheye images > 180 grad
theta_d = min(max(-CV_PI/2., theta_d), CV_PI/2.);
bool converged = false;
double theta = theta_d;
double scale = 0.0;
if (!isEps || fabs(theta_d) > criteria.epsilon)
{
// compensate distortion iteratively using Newton method
for (int j = 0; j < maxCount; j++)
{
double theta2 = theta*theta, theta4 = theta2*theta2, theta6 = theta4*theta2, theta8 = theta6*theta2;
double k0_theta2 = k[0] * theta2, k1_theta4 = k[1] * theta4, k2_theta6 = k[2] * theta6, k3_theta8 = k[3] * theta8;
/* new_theta = theta - theta_fix, theta_fix = f0(theta) / f0'(theta) */
double theta_fix = (theta * (1 + k0_theta2 + k1_theta4 + k2_theta6 + k3_theta8) - theta_d) /
(1 + 3*k0_theta2 + 5*k1_theta4 + 7*k2_theta6 + 9*k3_theta8);
theta = theta - theta_fix;
if (isEps && (fabs(theta_fix) < criteria.epsilon))
{
converged = true;
break;
}
}
scale = std::tan(theta) / theta_d;
}
else
{
converged = true;
}
// theta is monotonously increasing or decreasing depending on the sign of theta
// if theta has flipped, it might converge due to symmetry but on the opposite of the camera center
// so we can check whether theta has changed the sign during the optimization
bool theta_flipped = ((theta_d < 0 && theta > 0) || (theta_d > 0 && theta < 0));
if ((converged || !isEps) && !theta_flipped)
{
Vec2d pu = pw * scale; //undistorted point
// reproject
Vec3d pr = RR * Vec3d(pu[0], pu[1], 1.0); // rotated point optionally multiplied by new camera matrix
Vec2d fi(pr[0]/pr[2], pr[1]/pr[2]); // final
if( sdepth == CV_32F )
dstf[i] = fi;
else
dstd[i] = fi;
}
else
{
// Vec2d fi(std::numeric_limits<double>::quiet_NaN(), std::numeric_limits<double>::quiet_NaN());
Vec2d fi(-1000000.0, -1000000.0);
if( sdepth == CV_32F )
dstf[i] = fi;
else
dstd[i] = fi;
}
}
我们来依次讲解每一步处理的作用。首先,pi存的是像素坐标系下带有畸变的点,通过内参矩阵(此处不考虑倾斜因子),得到点pw,即式(14)和式(15)的反向计算,得到$x’,y’$。接着计算theta_d,即$\theta_d = \sqrt{x’^2+y’^2}$。
现在我们已经有了$\theta_d$,我们的目标是求解$\theta$。构建如下式子:
\[f(\theta) = \theta (1 + k_1\theta^2 + k_2 \theta^4+k_3\theta^6 +k_4\theta^8) - \theta_d \tag{21}\]我们的目标就是最小化上式。我们设$\theta_0 = \theta_d$,使用牛顿迭代法求解:
\[\theta_{n+1} = \theta_n - \frac{f(\theta_n)}{f'(\theta_n)} \tag{22}\]以上便是for (int j = 0; j < maxCount; j++)循环里的计算。接下来计算的scale就是$\frac{r}{\theta_d}$。通过Vec2d pu = pw * scale;计算得到的pu就是$(a,b)$(见式(12)和式(13))。pu的齐次坐标可视为相机坐标系下的点,然后通过RR矩阵进行转换(即Vec3d pr = RR * Vec3d(pu[0], pu[1], 1.0);),这个RR由两个矩阵相乘得到:
- 第一个矩阵是一个旋转矩阵(即输入参数
R),将相机坐标系下的该点进行旋转,默认是单位矩阵,不进行任何旋转。 - 第二个矩阵是一个新的内参矩阵(即输入参数
P),用于将相机坐标系下的该点转换回像素坐标系。默认也可视为是一个单位矩阵,即不转换回像素坐标系。
最后将得到的pr进行归一化:Vec2d fi(pr[0]/pr[2], pr[1]/pr[2]);,得到像素坐标系下去畸变之后的点fi,至此,针对一个点的去畸变操作完成。最后将所有去畸变的点存入dstf或dstd,并通过API返回。
4.cv::fisheye::estimateNewCameraMatrixForUndistortRectify
4.1.API介绍
1
2
3
4
5
6
7
8
9
10
void cv::fisheye::estimateNewCameraMatrixForUndistortRectify (
InputArray K,
InputArray D,
const Size & image_size,
InputArray R,
OutputArray P,
double balance = 0.0,
const Size & new_size = Size(),
double fov_scale = 1.0
)
参数解释:
K:输入的带有畸变的内参矩阵。D:输入的畸变系数$(k_1,k_2,k_3,k_4)$。image_size:图像大小。R:校正变换。P:输出的去畸变后的内参矩阵。balance:在最小焦距和最大焦距范围内设置一个新的焦距。该参数取值范围为$[0,1]$。new_size:新的图像大小。fov_scale:新焦距的除数。
4.2.源码解析
对输入参数有效性的判断:
1
2
3
4
CV_INSTRUMENT_REGION();
CV_Assert( K.size() == Size(3, 3) && (K.depth() == CV_32F || K.depth() == CV_64F));
CV_Assert(D.empty() || ((D.total() == 4) && (D.depth() == CV_32F || D.depth() == CV_64F)));
输入图像尺寸(w,h)和balance:
1
2
int w = image_size.width, h = image_size.height;
balance = std::min(std::max(balance, 0.0), 1.0);
将图像上下左右4个边界上的中心点喂入cv::fisheye::undistortPoints,得到去畸变后的点:
1
2
3
4
5
6
7
8
cv::Mat points(1, 4, CV_64FC2);
Vec2d* pptr = points.ptr<Vec2d>();
pptr[0] = Vec2d(w/2, 0);
pptr[1] = Vec2d(w, h/2);
pptr[2] = Vec2d(w/2, h);
pptr[3] = Vec2d(0, h/2);
fisheye::undistortPoints(points, points, K, D, R);
输入参数R只用于传给cv::fisheye::undistortPoints,R默认是单位矩阵,不做任何旋转。而我们并没有给cv::fisheye::undistortPoints传入参数P,相当于我们没有将点转回到像素坐标系,所以cv::fisheye::undistortPoints返回的points是相机坐标系下的齐次坐标。
将points中4个点的中心存入cn:
1
2
cv::Scalar center_mass = mean(points);
cv::Vec2d cn(center_mass.val);
对points和cn的x方向和y方向做各向同性处理:
1
2
3
4
5
6
7
double aspect_ratio = (K.depth() == CV_32F) ? K.getMat().at<float >(0,0)/K.getMat().at<float> (1,1)
: K.getMat().at<double>(0,0)/K.getMat().at<double>(1,1);
// convert to identity ratio
cn[1] *= aspect_ratio;
for(size_t i = 0; i < points.total(); ++i)
pptr[i][1] *= aspect_ratio;
求points中4个点x坐标的最小值minx、x坐标的最大值maxx、y坐标的最小值miny以及y坐标的最大值maxy:
1
2
3
4
5
6
7
8
double minx = DBL_MAX, miny = DBL_MAX, maxx = -DBL_MAX, maxy = -DBL_MAX;
for(size_t i = 0; i < points.total(); ++i)
{
miny = std::min(miny, pptr[i][1]);
maxy = std::max(maxy, pptr[i][1]);
minx = std::min(minx, pptr[i][0]);
maxx = std::max(maxx, pptr[i][0]);
}
接下来就是去畸变内参矩阵中焦距(即$f_x,f_y$)的计算:
1
2
3
4
5
6
7
8
9
10
double f1 = w * 0.5/(cn[0] - minx);
double f2 = w * 0.5/(maxx - cn[0]);
double f3 = h * 0.5 * aspect_ratio/(cn[1] - miny);
double f4 = h * 0.5 * aspect_ratio/(maxy - cn[1]);
double fmin = std::min(f1, std::min(f2, std::min(f3, f4)));
double fmax = std::max(f1, std::max(f2, std::max(f3, f4)));
double f = balance * fmin + (1.0 - balance) * fmax;
f *= fov_scale > 0 ? 1.0/fov_scale : 1.0;
为了确保去畸变后的图像在新的图像平面上具有适当的视场,并且图像的所有部分都能够正确投影到新的图像平面上,这里将f限定在fmin和fmax范围内。然后再用fov_scale进一步调整焦距。
这里先解释下f1的计算(f2、f3、f4同理)。我们希望去畸变图像的大小和原始图像差不多,即中心点到边界的距离是差不多的,也就是说,cn[0]和minx转换回像素坐标系后的距离和w * 0.5是一样的。cn[0]转换回像素坐标系的公式是cn[0] * f1 + cx,minx转换回像素坐标系的公式是minx * f1 + cx,二者的距离是(cn[0]-minx) * f1,这个距离要等于w * 0.5,据此,我们便可得到上述代码中f1的计算。
通过对齐中心点到不同边界的距离,我们可以得到f1、f2、f3、f4,这4个焦距的最小值记为fmin,最大值记为fmax,通过比例参数balance来设置f在这个范围内的取值。fov_scale用于对焦距的进一步调整。
去畸变内参矩阵中$c_x,c_y$的计算:
1
cv::Vec2d new_f(f, f), new_c = -cn * f + Vec2d(w, h * aspect_ratio) * 0.5;
我们希望中心点cn可以对齐原始图像的中心位置,所以会有(以x坐标为例)cn[0] * f + cx = w * 0.5,因此,可以得到cx = -cn[0] * f + w * 0.5,cy同理。
恢复各向异性:
1
2
3
// restore aspect ratio
new_f[1] /= aspect_ratio;
new_c[1] /= aspect_ratio;
如果去畸变图像的大小不想和原始图像一样,可以设置新的图像大小(见本文第1.1部分):
1
2
3
4
5
6
7
8
if (!new_size.empty())
{
double rx = new_size.width /(double)image_size.width;
double ry = new_size.height/(double)image_size.height;
new_f[0] *= rx; new_f[1] *= ry;
new_c[0] *= rx; new_c[1] *= ry;
}
返回最终的去畸变内参矩阵:
1
2
3
Mat(Matx33d(new_f[0], 0, new_c[0],
0, new_f[1], new_c[1],
0, 0, 1)).convertTo(P, P.empty() ? K.type() : P.type());
5.cv::fisheye::initUndistortRectifyMap
有了去畸变的内参矩阵之后,如何得到去畸变后的图像呢?我们可以调用cv::fisheye::initUndistortRectifyMap先得到去畸变图像的map1和map2,然后再调用cv::remap得到去畸变后的图像。
1
2
3
4
5
6
7
8
9
10
void cv::fisheye::initUndistortRectifyMap (
InputArray K,
InputArray D,
InputArray R,
InputArray P,
const cv::Size & size,
int m1type,
OutputArray map1,
OutputArray map2
)
参数解释:
K:带有畸变的内参矩阵。D:畸变系数$(k_1,k_2,k_3,k_4)$。R:校正变换。P:去畸变的内参矩阵。size:去畸变图像的大小。m1type:map1的类型,可以是CV_32FC1或CV_16SC2。map1:第一个输出map,见cv::remap。map2:第二个输出map,见cv::remap。
