本文为原创文章,未经本人允许,禁止转载。转载请注明出处。
1.Canny边缘检测算法
Canny边缘检测算法是1986年提出的。其主要分为5步:
前三步在之前的博客中都有所介绍,现在着重讲解下后两步。
👉第4步:非最大信号抑制:
经过前三步的处理之后,我们得到的边缘可能很模糊,而这一步就是起到将边缘“瘦身”的作用。其主要做法为:
- 将当前像素的梯度强度(即灰度值)与沿正负梯度方向上的两个像素进行比较。
- 如果当前像素的梯度强度与另外两个像素相比最大,则该像素点保留为边缘点,否则该像素点将被抑制(即灰度值置为0)。
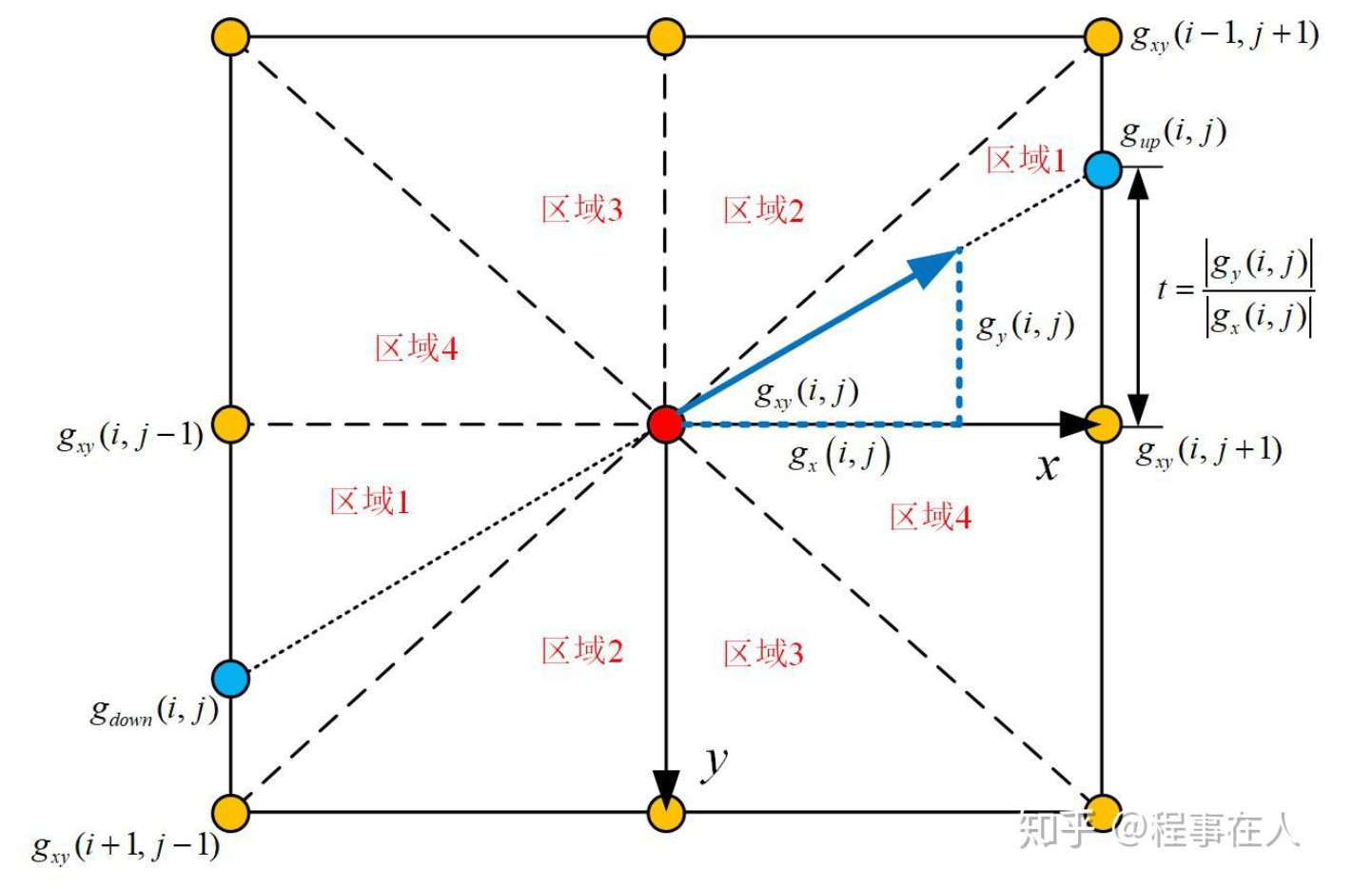
如上图所示,共有9个相邻的像素点(8个黄色点+1个红色点)。以中心像素点(红色点)为例,如果梯度方向刚好是$45^o$的整倍数,那么中心像素点刚好在梯度方向上都有相邻的两个像素。但如果梯度方向不是$45^o$的整倍数,则其会横穿两个像素之间,因此我们需要对其进行线性插值来精确计算。以上图为例,假设蓝色箭头所示方向为梯度方向,则通过线性插值得到的两个像素点(蓝色点)的计算方式为:
\[g_{up}(i,j)=(1-t)\cdot g_{xy}(i,j+1)+t \cdot g_{xy}(i-1,j+1)\] \[g_{down}(i,j)=(1-t)\cdot g_{xy}(i,j-1)+t \cdot g_{xy}(i+1,j-1)\]如果:
\[g_{xy}(i,j) \geqslant g_{up}(i,j) \ and \ g_{xy}(i,j) \geqslant g_{down}(i,j)\]则$g_{xy}(i,j)$被认为是边缘,否则应该被抑制,即灰度值置为0。
👉第5步:高低阈值输出二值图像:
定义一个高阈值和一个低阈值,大于高阈值的像素点都被检测为边缘,而低于低阈值的像素点都被检测为非边缘。对于像素值位于高低阈值之间的像素点,如果与确定为边缘的像素点邻接,则判定为边缘,否则为非边缘。
推荐的高低阈值比值为2:1或3:1。
2.cv::Canny
1
2
3
4
5
6
7
8
void Canny(
InputArray image,
OutputArray edges,
double threshold1,
double threshold2,
int apertureSize = 3,
bool L2gradient = false
);
参数详解:
InputArray image:8-bit的输入图像,例如灰度图。OutputArray edges:输出的边缘检测图像。一般为二值图像,背景是黑色。double threshold1:低阈值,常取高阈值的$\frac{1}{2}$或者$\frac{1}{3}$。double threshold2:高阈值。int apertureSize:Sobel算子的size,通常取3。bool L2gradient:计算梯度值的方式。true表示使用L2正则化(更精确);false表示使用L1正则化(计算量更小)。
