【CUDA编程】系列博客参考NVIDIA官方文档“CUDA C++ Programming Guide(v12.6)”。
本文为原创文章,未经本人允许,禁止转载。转载请注明出处。
1.Synchronization Functions
1
void __syncthreads();
__syncthreads()会等待线程块中的所有线程到达这个同步点。__syncthreads()可以在条件语句中使用,但只有当条件在整个线程块中计算结果相同时才可以。否则,代码执行可能会挂起或产生意外的副作用。
计算能力2.x及以上的device支持__syncthreads()的三种变体,如下所示。
1
int __syncthreads_count(int predicate);
predicate是一个布尔表达式或逻辑判断,用于检查某个线程是否满足特定的条件。__syncthreads_count()返回满足条件的线程数量。比如int count = __syncthreads_count(threadIdx.x % 2 == 0);返回线程块中线程索引为偶数的线程数量。
1
int __syncthreads_and(int predicate);
当所有线程都满足条件时(即所有线程的predicate都为非零值时),__syncthreads_and()返回非零值。
1
int __syncthreads_or(int predicate);
当至少有一个线程满足条件时,__syncthreads_or()就返回非零值。
1
void __syncwarp(unsigned mask=0xffffffff);
__syncwarp()是一种轻量级的同步机制,专门用于同步warp内的线程。通过指定mask,可以选择性的同步warp内的某些线程,而非同步整个warp。其中,mask是一个32位的整数,每一位对应warp中的一个线程。若mask的某一位为1,则表示对应线程需要参与同步。默认值0xffffffff表示warp中所有线程都需要同步。所有参与同步的线程必须调用相同的__syncwarp(),并使用相同的mask,否则结果是未定义的。
执行__syncwarp()能够保证参与屏障的线程之间的内存顺序。因此,warp中的线程若需要通过内存进行通信,可以先写入内存,然后执行__syncwarp(),接着安全地读取其他线程存储的值。
2.Texture Functions
2.1.Texture Object API
2.1.1.tex1Dfetch()
1
2
template<class T>
T tex1Dfetch(cudaTextureObject_t texObj, int x);
tex1Dfetch()从一维纹理对象texObj指定的线性内存区域中,根据整数纹理坐标x获取数据。tex1Dfetch()仅支持非归一化坐标,因此仅支持clamp mode和border mode作为寻址模式。此函数不执行任何纹理过滤。对于整数类型的纹理数据,它可能会选择性地将整数提升为单精度浮点数。
2.1.2.tex1D()
1
2
template<class T>
T tex1D(cudaTextureObject_t texObj, float x);
tex1D()从一维纹理对象texObj指定的CUDA array中,根据纹理坐标x获取数据。与tex1Dfetch()不同,tex1D()使用的是归一化坐标。
2.1.3.tex1DLod()
1
2
template<class T>
T tex1DLod(cudaTextureObject_t texObj, float x, float level);
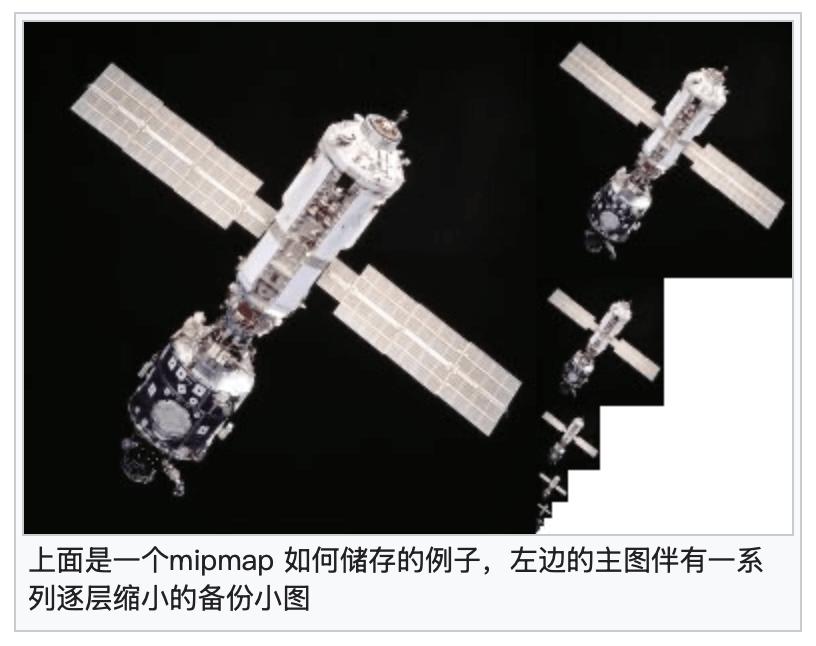
为了解释参数level,我们先来解释mipmap。mipmap(也称为MIP maps或pyramids)是计算机图形学中用于纹理采样和优化的一种技术。它通过存储纹理的多个分辨率版本,解决了纹理放缩时的性能和质量问题。比如原始纹理的分辨率为$1024 \times 1024$(第0层),通常来说,mipmap中每一层的分辨率是上一层分辨率的一半,那么第1层纹理的分辨率就是$512 \times 512$,第2层纹理的分辨率就是$256 \times 256$,直至分辨率降为$1 \times 1$。下面是一个mipmap如何存储的例子,左边的主图伴有一系列逐层缩小的备份小图。
而我们可以使用LOD(level-of-detail,即参数level)的值决定从哪个分辨率层级中采样。假设mipmap一共有$n$层,那么LOD的取值范围就是$[0,n]$,非整数的LOD值会进行插值,使用相邻两个层级的纹理数据混合得到采样值。
tex1DLod()从一维纹理对象texObj指定的CUDA array中,根据特定level层级中的纹理坐标x来获取数据。
2.1.4.tex1DGrad()
1
2
template<class T>
T tex1DGrad(cudaTextureObject_t texObj, float x, float dx, float dy);
与tex1DLod()不同之处在于,tex1DGrad()所用的LOD值是通过X方向梯度dx和Y方向梯度dy推导得到的。
2.1.5.tex2D()
1
2
template<class T>
T tex2D(cudaTextureObject_t texObj, float x, float y);
tex2D()从二维纹理对象texObj指定的CUDA array或线性内存区域中,根据二维纹理坐标(x,y)获取数据。
2.1.6.tex2D() for sparse CUDA arrays
1
2
template<class T>
T tex2D(cudaTextureObject_t texObj, float x, float y, bool* isResident);
从二维纹理对象texObj指定的稀疏CUDA array中,根据二维纹理坐标(x,y)获取数据。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.7.tex2Dgather()
1
2
3
template<class T>
T tex2Dgather(cudaTextureObject_t texObj,
float x, float y, int comp = 0);
从二维纹理对象texObj指定的CUDA array中,根据二维纹理坐标(x,y)以及参数comp(详见:Texture Gather)获取数据。
2.1.8.tex2Dgather() for sparse CUDA arrays
1
2
3
template<class T>
T tex2Dgather(cudaTextureObject_t texObj,
float x, float y, bool* isResident, int comp = 0);
从二维纹理对象texObj指定的稀疏CUDA array中,根据二维纹理坐标(x,y)以及参数comp获取数据。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.9.tex2DGrad()
1
2
3
template<class T>
T tex2DGrad(cudaTextureObject_t texObj, float x, float y,
float2 dx, float2 dy);
从二维纹理对象texObj指定的CUDA array中,根据二维纹理坐标(x,y)获取数据。LOD值通过梯度dx和dy计算得到。
2.1.10.tex2DGrad() for sparse CUDA arrays
1
2
3
template<class T>
T tex2DGrad(cudaTextureObject_t texObj, float x, float y,
float2 dx, float2 dy, bool* isResident);
从二维纹理对象texObj指定的稀疏CUDA array中,根据二维纹理坐标(x,y)获取数据。LOD值通过梯度dx和dy计算得到。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.11.tex2DLod()
1
2
template<class T>
tex2DLod(cudaTextureObject_t texObj, float x, float y, float level);
从二维纹理对象texObj指定的CUDA array或线性内存区域中,在特定level层级(即LOD值)中,根据二维纹理坐标(x,y)获取数据。
2.1.12.tex2DLod() for sparse CUDA arrays
1
2
template<class T>
tex2DLod(cudaTextureObject_t texObj, float x, float y, float level, bool* isResident);
从二维纹理对象texObj指定的稀疏CUDA array中,在特定level层级(即LOD值)中,根据二维纹理坐标(x,y)获取数据。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.13.tex3D()
1
2
template<class T>
T tex3D(cudaTextureObject_t texObj, float x, float y, float z);
从三维纹理对象texObj指定的CUDA array中,根据三维纹理坐标(x,y,z)获取数据。
2.1.14.tex3D() for sparse CUDA arrays
1
2
template<class T>
T tex3D(cudaTextureObject_t texObj, float x, float y, float z, bool* isResident);
从三维纹理对象texObj指定的稀疏CUDA array中,根据三维纹理坐标(x,y,z)获取数据。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.15.tex3DLod()
1
2
template<class T>
T tex3DLod(cudaTextureObject_t texObj, float x, float y, float z, float level);
从三维纹理对象texObj指定的CUDA array或线性内存区域中,在特定level层级(即LOD值)中,根据三维纹理坐标(x,y,z)获取数据。
2.1.16.tex3DLod() for sparse CUDA arrays
1
2
template<class T>
T tex3DLod(cudaTextureObject_t texObj, float x, float y, float z, float level, bool* isResident);
从三维纹理对象texObj指定的稀疏CUDA array或线性内存区域中,在特定level层级(即LOD值)中,根据三维纹理坐标(x,y,z)获取数据。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.17.tex3DGrad()
1
2
3
template<class T>
T tex3DGrad(cudaTextureObject_t texObj, float x, float y, float z,
float4 dx, float4 dy);
从三维纹理对象texObj指定的CUDA array中,在特定LOD值下,根据三维纹理坐标(x,y,z)获取数据。其中,LOD值通过X方向梯度dx和Y方向梯度dy计算得到。
2.1.18.tex3DGrad() for sparse CUDA arrays
1
2
3
template<class T>
T tex3DGrad(cudaTextureObject_t texObj, float x, float y, float z,
float4 dx, float4 dy, bool* isResident);
从三维纹理对象texObj指定的稀疏CUDA array中,在特定LOD值下,根据三维纹理坐标(x,y,z)获取数据。其中,LOD值通过X方向梯度dx和Y方向梯度dy计算得到。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.19.tex1DLayered()
1
2
template<class T>
T tex1DLayered(cudaTextureObject_t texObj, float x, int layer);
从一维纹理对象texObj指定的CUDA array中,根据一维纹理坐标x和层索引layer获取数据。
2.1.20.tex1DLayeredLod()
1
2
template<class T>
T tex1DLayeredLod(cudaTextureObject_t texObj, float x, int layer, float level);
从一维纹理对象texObj指定的CUDA array中,在特定level层级(即LOD值)中,根据一维纹理坐标x和层索引layer获取数据。
2.1.21.tex1DLayeredGrad()
1
2
3
template<class T>
T tex1DLayeredGrad(cudaTextureObject_t texObj, float x, int layer,
float dx, float dy);
从一维纹理对象texObj指定的CUDA array中,在特定LOD值下,根据一维纹理坐标x和层索引layer获取数据。其中,LOD值通过X方向梯度dx和Y方向梯度dy计算得到。
2.1.22.tex2DLayered()
1
2
3
template<class T>
T tex2DLayered(cudaTextureObject_t texObj,
float x, float y, int layer);
从二维纹理对象texObj指定的CUDA array中,根据二维纹理坐标(x,y)和层索引layer获取数据。
2.1.23.tex2DLayered() for Sparse CUDA Arrays
1
2
3
template<class T>
T tex2DLayered(cudaTextureObject_t texObj,
float x, float y, int layer, bool* isResident);
从二维纹理对象texObj指定的稀疏CUDA array中,根据二维纹理坐标(x,y)和层索引layer获取数据。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.24.tex2DLayeredLod()
1
2
3
template<class T>
T tex2DLayeredLod(cudaTextureObject_t texObj, float x, float y, int layer,
float level);
从二维纹理对象texObj指定的CUDA array中,在特定level层级(即LOD值)中,根据二维纹理坐标(x,y)和层索引layer获取数据。
2.1.25.tex2DLayeredLod() for sparse CUDA arrays
1
2
3
template<class T>
T tex2DLayeredLod(cudaTextureObject_t texObj, float x, float y, int layer,
float level, bool* isResident);
从二维纹理对象texObj指定的稀疏CUDA array中,在特定level层级(即LOD值)中,根据二维纹理坐标(x,y)和层索引layer获取数据。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.26.tex2DLayeredGrad()
1
2
3
template<class T>
T tex2DLayeredGrad(cudaTextureObject_t texObj, float x, float y, int layer,
float2 dx, float2 dy);
从二维纹理对象texObj指定的CUDA array中,在特定LOD值下,根据二维纹理坐标(x,y)和层索引layer获取数据。其中,LOD值通过X方向梯度dx和Y方向梯度dy计算得到。
2.1.27.tex2DLayeredGrad() for sparse CUDA arrays
1
2
3
template<class T>
T tex2DLayeredGrad(cudaTextureObject_t texObj, float x, float y, int layer,
float2 dx, float2 dy, bool* isResident);
从二维纹理对象texObj指定的稀疏CUDA array中,在特定LOD值下,根据二维纹理坐标(x,y)和层索引layer获取数据。其中,LOD值通过X方向梯度dx和Y方向梯度dy计算得到。同时,通过指针isResident返回该texel是否驻留在显存中。如果texel不在显存中,则函数返回值为零。
2.1.28.texCubemap()
1
2
template<class T>
T texCubemap(cudaTextureObject_t texObj, float x, float y, float z);
从cubemap纹理对象texObj指定的CUDA array中,根据纹理坐标(x,y,z)获取数据。
2.1.29.texCubemapGrad()
1
2
3
template<class T>
T texCubemapGrad(cudaTextureObject_t texObj, float x, float, y, float z,
float4 dx, float4 dy);
从cubemap纹理对象texObj指定的CUDA array中,根据纹理坐标(x,y,z)获取数据。梯度dx和dy用于确定LOD值。
2.1.30.texCubemapLod()
1
2
3
template<class T>
T texCubemapLod(cudaTextureObject_t texObj, float x, float, y, float z,
float level);
从cubemap纹理对象texObj指定的CUDA array中,根据纹理坐标(x,y,z)获取数据。参数level用于指定LOD值。
2.1.31.texCubemapLayered()
1
2
3
template<class T>
T texCubemapLayered(cudaTextureObject_t texObj,
float x, float y, float z, int layer);
从cubemap分层纹理对象texObj指定的CUDA array中,根据纹理坐标(x,y,z)和层索引layer获取数据。
2.1.32.texCubemapLayeredGrad()
1
2
3
template<class T>
T texCubemapLayeredGrad(cudaTextureObject_t texObj, float x, float y, float z,
int layer, float4 dx, float4 dy);
从cubemap分层纹理对象texObj指定的CUDA array中,根据纹理坐标(x,y,z)和层索引layer获取数据。梯度dx和dy用于确定LOD值。
2.1.33.texCubemapLayeredLod()
1
2
3
template<class T>
T texCubemapLayeredLod(cudaTextureObject_t texObj, float x, float y, float z,
int layer, float level);
从cubemap分层纹理对象texObj指定的CUDA array中,根据纹理坐标(x,y,z)和层索引layer获取数据。参数level用于指定LOD值。
3.Surface Functions
参考:Surface Memory。
表面函数(surface functions)仅支持计算能力2.0及以上的device。
在第3.1部分中,boundaryMode指定了边界模式,即如何处理超出范围的表面坐标。当边界模式设置为cudaBoundaryModeClamp时,超出范围的坐标会被限制在有效范围内。当边界模式设置为cudaBoundaryModeZero时,超出范围的读操作返回零,写操作会被忽略。当边界模式设置为cudaBoundaryModeTrap时,超出范围的访问会导致kernel执行失败。
3.1.Surface Object API
3.1.1.surf1Dread()
1
2
3
template<class T>
T surf1Dread(cudaSurfaceObject_t surfObj, int x,
boundaryMode = cudaBoundaryModeTrap);
从一维表面对象surfObj指定的CUDA array中,使用字节坐标x读取数据。
3.1.2.surf1Dwrite
1
2
3
4
5
template<class T>
void surf1Dwrite(T data,
cudaSurfaceObject_t surfObj,
int x,
boundaryMode = cudaBoundaryModeTrap);
将值data写入到由一维表面对象surfObj指定的CUDA array中,写入的位置由字节坐标x指定。
3.1.3.surf2Dread()
1
2
3
4
5
6
7
8
9
template<class T>
T surf2Dread(cudaSurfaceObject_t surfObj,
int x, int y,
boundaryMode = cudaBoundaryModeTrap);
template<class T>
void surf2Dread(T* data,
cudaSurfaceObject_t surfObj,
int x, int y,
boundaryMode = cudaBoundaryModeTrap);
从二维表面对象surfObj指定的CUDA array中,使用字节坐标x和y读取数据。
3.1.4.surf2Dwrite()
1
2
3
4
5
template<class T>
void surf2Dwrite(T data,
cudaSurfaceObject_t surfObj,
int x, int y,
boundaryMode = cudaBoundaryModeTrap);
将值data写入到由二维表面对象surfObj指定的CUDA array中,写入的位置由字节坐标x和y指定。
3.1.5.surf3Dread()
1
2
3
4
5
6
7
8
9
template<class T>
T surf3Dread(cudaSurfaceObject_t surfObj,
int x, int y, int z,
boundaryMode = cudaBoundaryModeTrap);
template<class T>
void surf3Dread(T* data,
cudaSurfaceObject_t surfObj,
int x, int y, int z,
boundaryMode = cudaBoundaryModeTrap);
从三维表面对象surfObj指定的CUDA array中,使用字节坐标x、y、z读取数据。
3.1.6.surf3Dwrite()
1
2
3
4
5
template<class T>
void surf3Dwrite(T data,
cudaSurfaceObject_t surfObj,
int x, int y, int z,
boundaryMode = cudaBoundaryModeTrap);
将值data写入到由三维表面对象surfObj指定的CUDA array中,写入的位置由字节坐标x、y、z指定。
3.1.7.surf1DLayeredread()
1
2
3
4
5
6
7
8
9
10
template<class T>
T surf1DLayeredread(
cudaSurfaceObject_t surfObj,
int x, int layer,
boundaryMode = cudaBoundaryModeTrap);
template<class T>
void surf1DLayeredread(T data,
cudaSurfaceObject_t surfObj,
int x, int layer,
boundaryMode = cudaBoundaryModeTrap);
从一维分层表面对象surfObj指定的CUDA array中,使用字节坐标x和层索引layer读取数据。
3.1.8.surf1DLayeredwrite()
1
2
3
4
5
template<class Type>
void surf1DLayeredwrite(T data,
cudaSurfaceObject_t surfObj,
int x, int layer,
boundaryMode = cudaBoundaryModeTrap);
将值data写入到由一维分层表面对象surfObj指定的CUDA array中,写入的位置由字节坐标x和层索引layer指定。
3.1.9.surf2DLayeredread()
1
2
3
4
5
6
7
8
9
10
template<class T>
T surf2DLayeredread(
cudaSurfaceObject_t surfObj,
int x, int y, int layer,
boundaryMode = cudaBoundaryModeTrap);
template<class T>
void surf2DLayeredread(T data,
cudaSurfaceObject_t surfObj,
int x, int y, int layer,
boundaryMode = cudaBoundaryModeTrap);
从二维分层表面对象surfObj指定的CUDA array中,使用字节坐标x、y和层索引layer读取数据。
3.1.10.surf2DLayeredwrite()
1
2
3
4
5
template<class T>
void surf2DLayeredwrite(T data,
cudaSurfaceObject_t surfObj,
int x, int y, int layer,
boundaryMode = cudaBoundaryModeTrap);
将值data写入到由二维分层表面对象surfObj指定的CUDA array中,写入的位置由字节坐标x、y和层索引layer指定。
3.1.11.surfCubemapread()
1
2
3
4
5
6
7
8
9
10
template<class T>
T surfCubemapread(
cudaSurfaceObject_t surfObj,
int x, int y, int face,
boundaryMode = cudaBoundaryModeTrap);
template<class T>
void surfCubemapread(T data,
cudaSurfaceObject_t surfObj,
int x, int y, int face,
boundaryMode = cudaBoundaryModeTrap);
从cubemap表面对象surfObj指定的CUDA array中,使用字节坐标x、y和面索引face读取数据。
3.1.12.surfCubemapwrite()
1
2
3
4
5
template<class T>
void surfCubemapwrite(T data,
cudaSurfaceObject_t surfObj,
int x, int y, int face,
boundaryMode = cudaBoundaryModeTrap);
将值data写入到由cubemap表面对象surfObj指定的CUDA array中,写入的位置由字节坐标x、y和面索引face指定。
3.1.13.surfCubemapLayeredread()
1
2
3
4
5
6
7
8
9
10
template<class T>
T surfCubemapLayeredread(
cudaSurfaceObject_t surfObj,
int x, int y, int layerFace,
boundaryMode = cudaBoundaryModeTrap);
template<class T>
void surfCubemapLayeredread(T data,
cudaSurfaceObject_t surfObj,
int x, int y, int layerFace,
boundaryMode = cudaBoundaryModeTrap);
从cubemap分层表面对象surfObj指定的CUDA array中,使用字节坐标x、y和索引layerFace读取数据。
3.1.14.surfCubemapLayeredwrite()
1
2
3
4
5
template<class T>
void surfCubemapLayeredwrite(T data,
cudaSurfaceObject_t surfObj,
int x, int y, int layerFace,
boundaryMode = cudaBoundaryModeTrap);
将值data写入到由cubemap分层表面对象surfObj指定的CUDA array中,写入的位置由字节坐标x、y和索引layerFace指定。
4.Read-Only Data Cache Load Function
只读数据缓存加载函数(read-only data cache load function)仅支持计算能力为5.0及以上的device。
1
T __ldg(const T* address);
__ldg()用于将全局内存中的数据放到只读数据缓存中,从而提高后续访问速度。适用于kernel中频繁读取、不会被修改的数据。
类型T可以是:
char、signed char、short、int、long、long long、unsigned char、unsigned short、unsigned int、unsigned long、unsigned long long。char2、char4、short2、short4、int2、int4、longlong2、uchar2、uchar4、ushort2、ushort4、uint2、uint4、ulonglong2。float、float2、float4、double、double2。- 如果包含了
cuda_fp16.h头文件,类型T还可以是__half或__half2。 - 如果包含了
cuda_bf16.h头文件,类型T还可以是__nv_bfloat16或__nv_bfloat162。
