本文为原创文章,未经本人允许,禁止转载。转载请注明出处。
1.Introduction
github源码地址:https://github.com/WongKinYiu/yolov7。
本文提出的方法不仅在网络结构上进行优化,还将重点关注训练过程的优化。我们将引入一些优化模块和训练方法,虽然这些方法可能会增加训练成本,但不会提升推理成本,从而在不影响推理速度的前提下提高检测精度。我们将这些优化模块和训练方法称为trainable bag-of-freebies。
2.Related work
不再赘述。
3.Architecture
3.1.Extended efficient layer aggregation networks
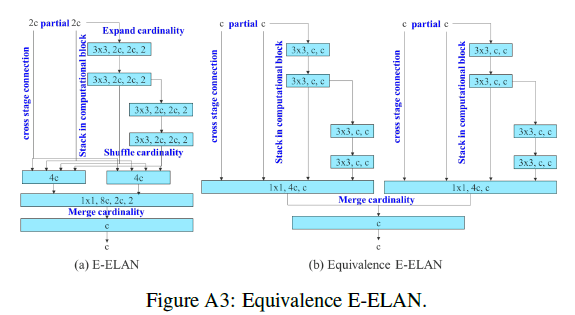
基于ELAN提出了Extended-ELAN(E-ELAN),如Fig2(d)所示。
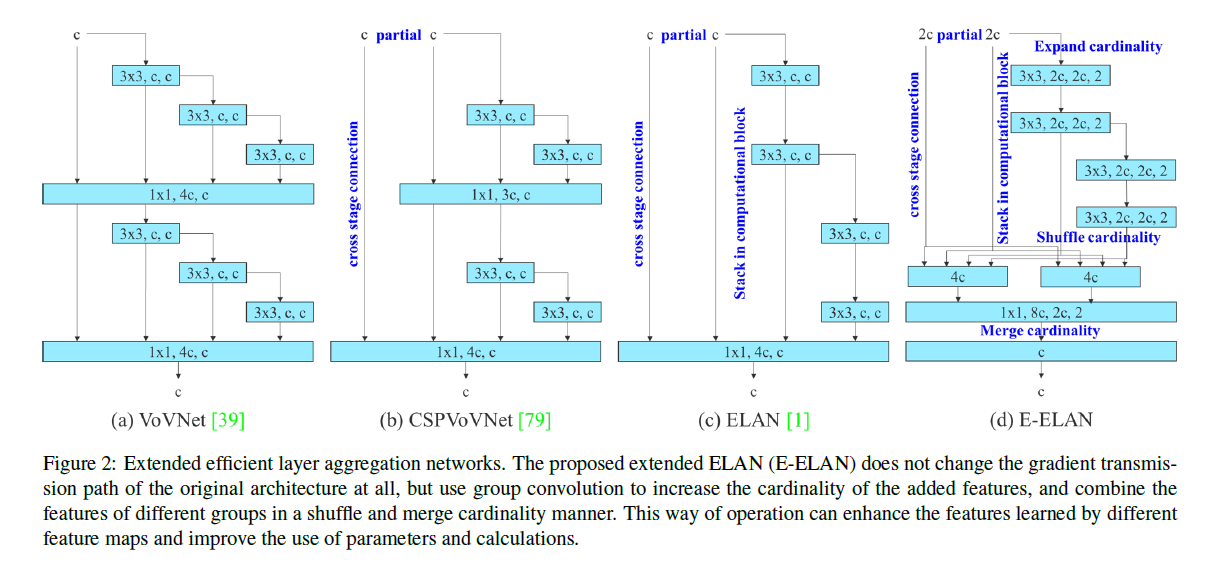
在Fig2(d)中,先解释几个概念,首先是cardinality,这个概念来自ResNeXt,表示分支路径的数量。Fig2(d)中的Expand cardinality是分组卷积的意思,”3x3, 2c, 2c, 2”表示使用$3 \times 3$卷积,输入通道数为2c,输出通道数也为2c,group数量为2。Shuffle cardinality就是channel shuffle操作。Fig2(d)详细展开如下所示:

但在实际代码实现时,作者使用了Fig2(d)的另一种等价结构,如下所示:
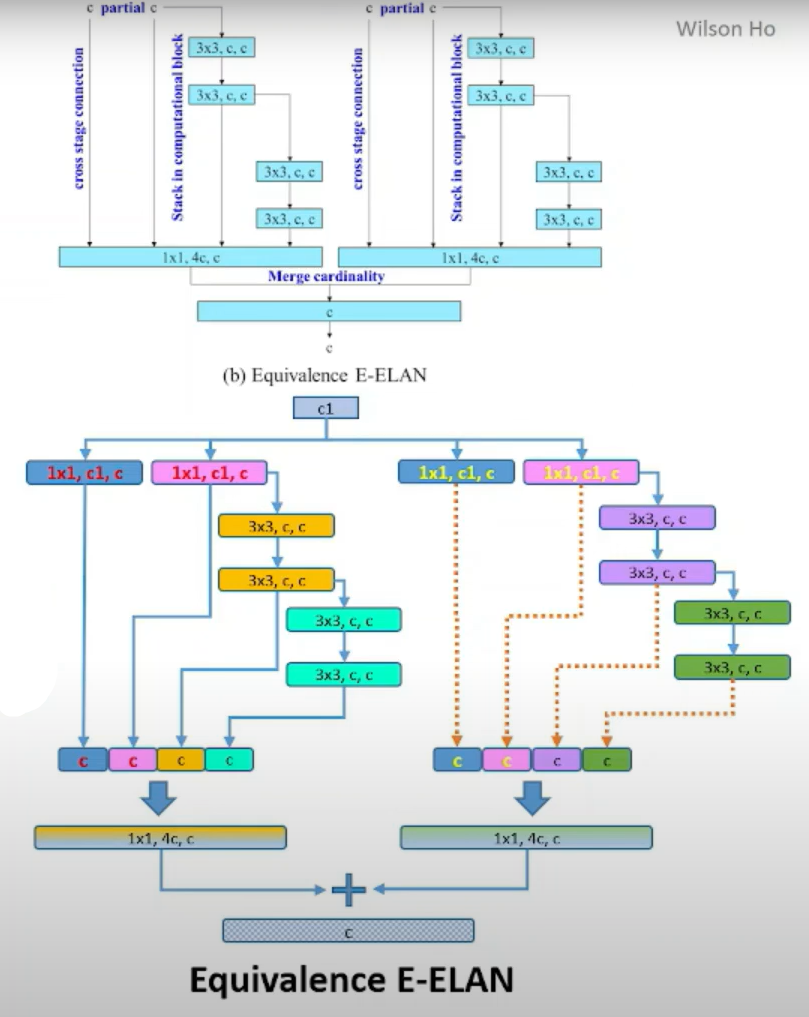
上下两张图是一个意思,其实就是并行了两个ELAN。
3.2.Model scaling for concatenation-based models
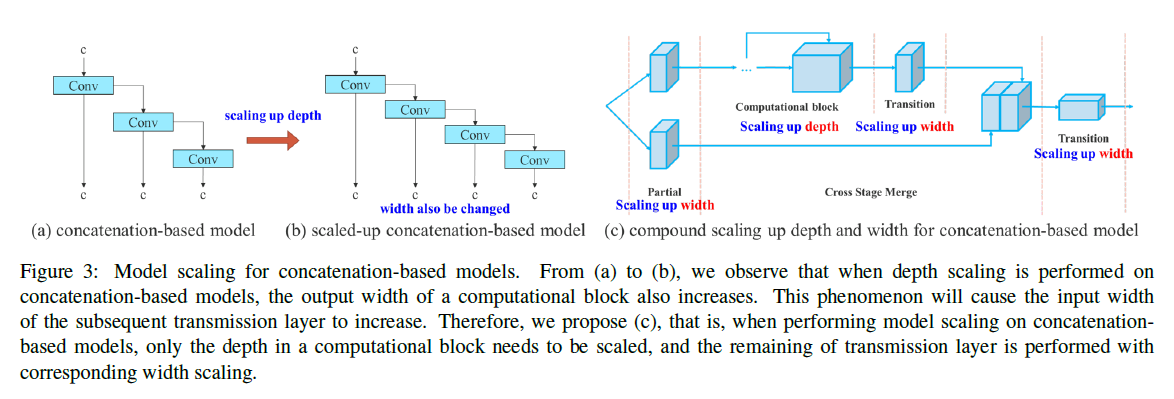
对于concatenation-based的架构,如Fig3(a)所示,如果我们想通过增加网络深度的方式来扩展网络模型,即Fig3(b)所示的形式,这样会导致concat之后的输出通道数变多,即不仅仅增加了深度,网络宽度也被迫增加,从而导致后续层的输入通道数增加,这会增加额外计算和参数,破坏了原有的比例关系。因此我们提出如Fig3(c)所示的方法,其核心思想就是通过transition layer来控制输出通道数。
4.Trainable bag-of-freebies
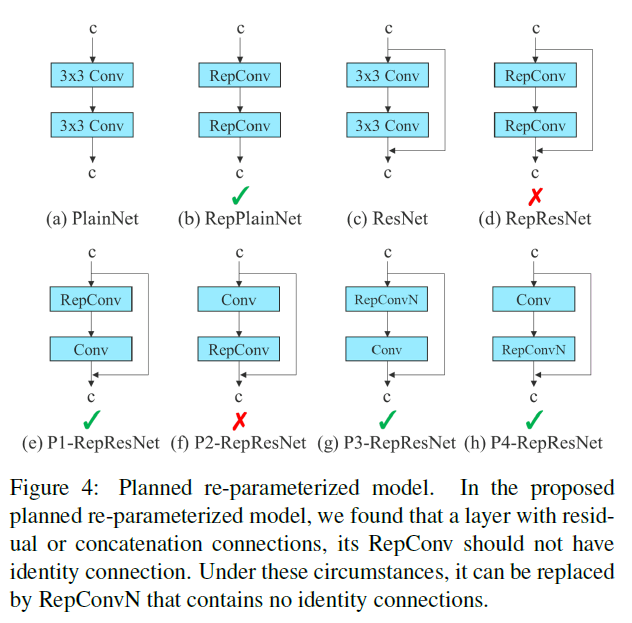
4.1.Planned re-parameterized convolution
当我们将RepConv直接应用于ResNet或DenseNet或其他框架时,模型精度会出现显著下降。因此我们重新设计了RepConv。
RepConv在一个卷积层中通常包含一个$3\times 3$卷积、一个$1\times 1$卷积和一个identity连接。我们发现identity连接破坏了ResNet的残差结构和DenseNet的concat操作,因此,我们去掉了RepConv中的identity连接,记为RepConvN。
4.2.Coarse for auxiliary and fine for lead loss
深度监督(deep supervision)是一种常用于深度网络训练的技术。其主要思想是在网络的中间层添加额外的auxiliary head,并利用assistant loss来引导浅层网络的权重更新。即使对于诸如ResNet和DenseNet这类通常收敛良好的架构,深度监督仍然能够显著提升模型在多种任务上的性能。Fig5(a)和Fig5(b)分别展示了没有深度监督和采用深度监督的目标检测架构。在这里,我们将负责最终输出的head称为lead head,而用于辅助训练的head称为auxiliary head。
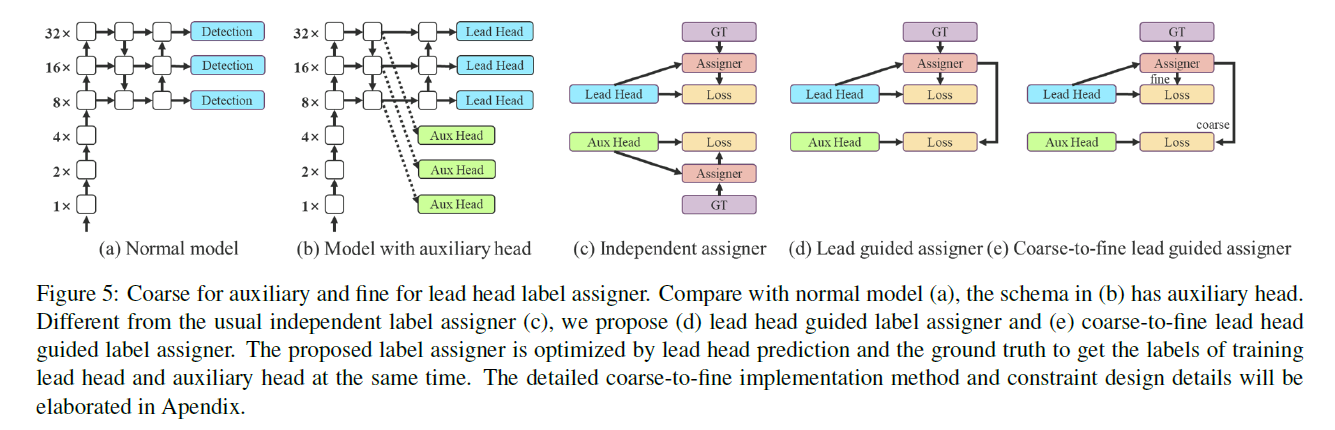
接下来我们要讨论label assignment的问题。在过去,在深度网络的训练过程中,label assignment通常是直接依据GT生成hard label,并按照预设规则进行分配。然而,近年来,以目标检测为例,研究者们往往会利用网络预测输出的质量和分布信息,再结合GT,通过一定的计算和优化方法来生成soft label。例如,YOLO使用预测框和真实框之间的IoU作为soft label。在这里,我们将这种同时考虑网络预测结果和GT,并据此分配soft label的机制称为label assigner。
那么我们该如何为lead head和auxiliary head分配soft label呢?据我们所知,目前尚未有相关文献探讨过这一问题。目前最常用的方法如Fig5(c)所示,即将lead head和auxiliary head分开,各自利用自身的预测结果和GT来进行label assignment。本文提出了一种新的label assignment方法,该方法利用lead head的预测结果来同时引导lead head和auxiliary head的训练,其包含两种不同的策略,见Fig5(d)和Fig5(e)。
👉Lead head guided label assigner
主要基于lead head的预测结果与GT进行计算,并通过优化过程生成soft label。这组soft label将同时用于训练lead head和auxiliary head。这样做的原因是lead head具有较强的学习能力,因此由其生成的soft label能够更好地反映源数据与目标之间的分布和相关性。此外,我们可以将这种学习方式视为一种广义的残差学习,通过让较浅层的auxiliary head直接学习lead head已经掌握的信息,lead head就能更专注于学习那些尚未被学习到的残差信息。
👉Coarse-to-fine lead head guided label assigner
同样基于lead head的预测结果与GT生成soft label。但是,在该过程中我们生成了两组不同的soft label,即coarse label和fine label。其中,fine label就是lead head的预测结果和GT直接生成的soft label,而coarse label则是在此基础上,放宽了对正样本标签的分配约束,即允许更多的grid被视为正样本。这样做的原因在于,auxiliary head的学习能力不如lead head强,为了避免遗漏需要学习的信息,我们在目标检测任务中更关注auxiliary head的recall优化,而对于lead head,我们则更关注precision的优化。
4.3.Other trainable bag-of-freebies
在训练中用到的一些BoF:
- 参考RepVGG,在推理阶段将BN层和卷积层进行融合。
- YOLOR中的隐性知识。
- 仅在推理阶段使用EMA模型。注意,和Momentum梯度下降法不同,Momentum梯度下降法是对梯度更新使用EMA,而这里说的EMA模型是指更新模型参数的策略。详细来说,就是在YOLOv7训练一开始的时候,会复制一份当前模型作为EMA模型,之后每训练一个batch,就会按照EMA的策略对EMA模型的参数进行更新,注意,并不会影响原有模型的训练进程。这样得到的EMA模型更为稳定,鲁棒性更好。
5.Experiments
5.1.Experimental setup
使用COCO数据集进行实验。所有实验都没有使用预训练模型。也就是说,所有模型都是从头开始训练的。我们使用train 2017 set用于训练,val 2017 set用于验证和超参数选择。在test 2017 set上进行评估。详细的训练参数设置见Appendix。
我们设计了3种基础模型:
- YOLOv7-tiny用于edge GPU。
- YOLOv7用于normal GPU。
- YOLOv7-W6用于cloud GPU。
通过对基础模型缩放,得到了许多变体,详见Appendix。需要注意的是,YOLOv7-tiny使用的是leaky ReLU作为激活函数。而其他模型使用SiLU作为激活函数。
5.2.Baselines

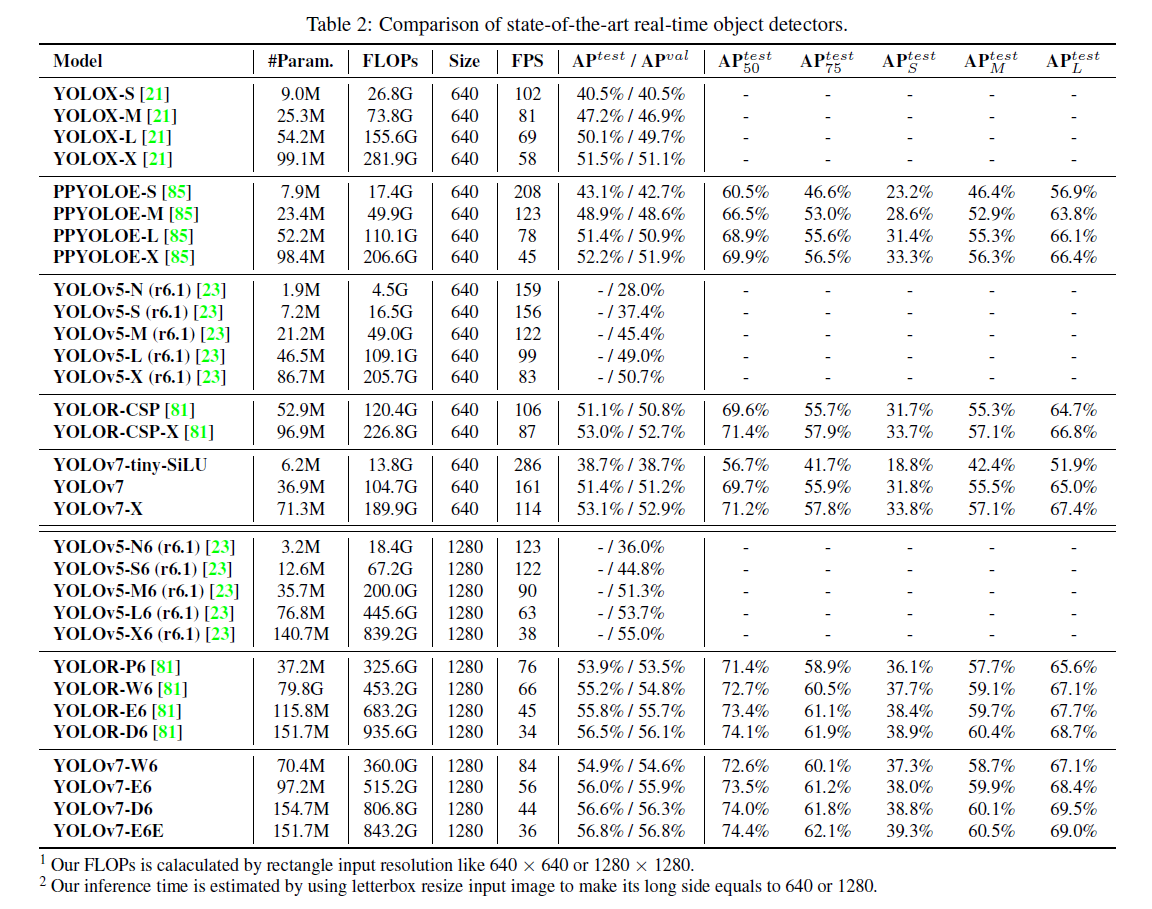
5.3.Comparison with state-of-the-arts
5.4.Ablation study
5.4.1.Proposed compound scaling method
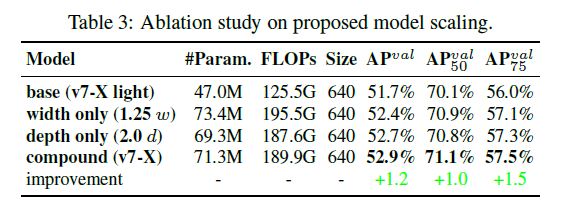
表3展示了模型缩放对性能的影响。第一行是base模型,第二行width only是仅将width扩大1.25倍,第三行depth only是仅将depth扩大2.0倍,第四行compound是将width扩大1.25倍的同时将depth扩大1.5倍。
5.4.2.Proposed planned re-parameterized model
为了验证我们所提出的重参数化方法的普适性。我们分别使用concatenation-based模型和residual-based模型用于验证。对于concatenation-based模型的验证,我们使用3个堆叠的ELAN;对于residual-based模型,我们使用CSPDarknet。
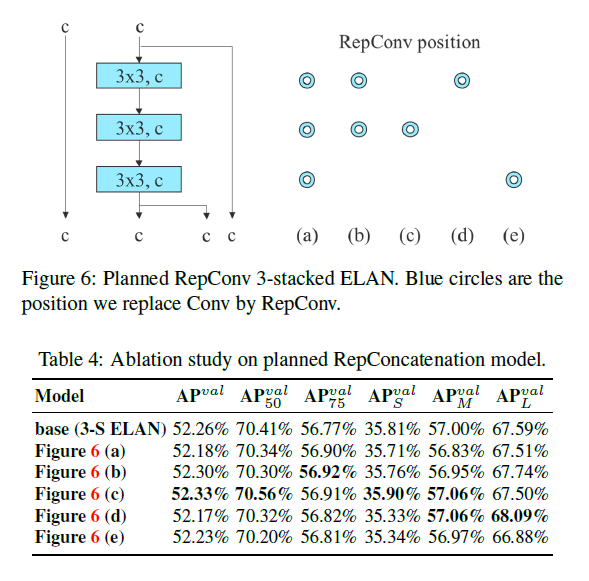
在验证concatenation-based模型时,我们将每个ELAN模块中的$3 \times 3$卷积层替换为RepConv。单个ELAN模块的结构如Fig6左图所示,和原始的ELAN结构有所不同,其中一条路径上有连续3个$3\times 3$卷积层,Fig6右图表示将对应位置的$3\times 3$卷积替换为RepConv。测试结果见表4。
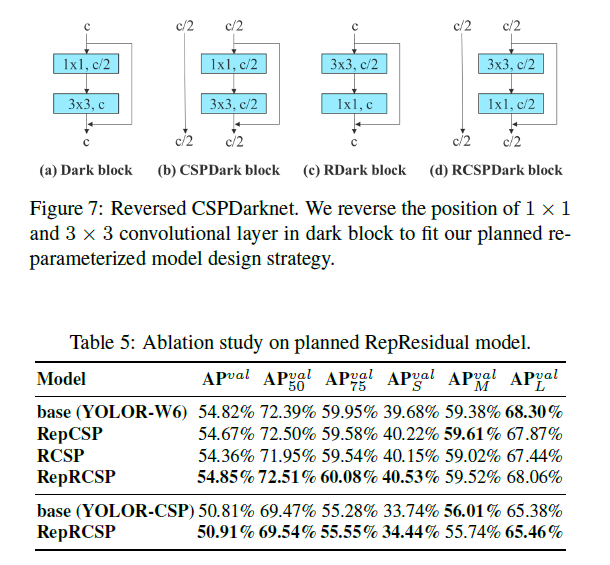
在验证residual-based模型时,如Fig7所示,Fig7(a)是原始的Darknet block,Fig7(b)是原始的CSPDarknet block。为了方便应用重参数化,将Darknet block和CSPDarknet block中的$3 \times 3$卷积挪到了$1 \times 1$卷积的前面,即Fig7(c)和Fig7(d)。测试结果见表5,其中RepCSP可参阅CSPRepResNet。
5.4.3.Proposed assistant loss for auxiliary head
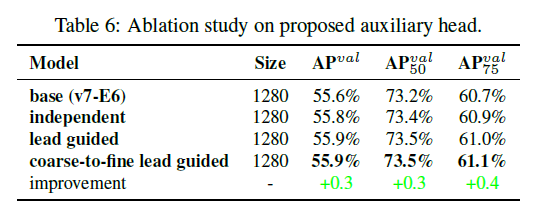
表6中的第二行“independent”表示的是lead head和auxiliary head各自采用独立的label assignment。
在Fig8中,Fig8(a)是输入图像,Fig8(b)和Fig8(c)指的是aux head和lead head的label assignment是各自独立的,Fig8(d)和Fig8(e)指的是第4.2部分提到的”Lead head guided label assigner”方式。以Fig8(b)为例,解释下如何看这个图。纵向”Pyramids”指的是金字塔feature map层级,横向”Anchors”指的是不同的3种anchor,所以说,$4 \times 3$中的每个格子都是一个objectness map,objectness map中每个grid的值越大(颜色越亮),就表示该grid存在object的可能性越大。
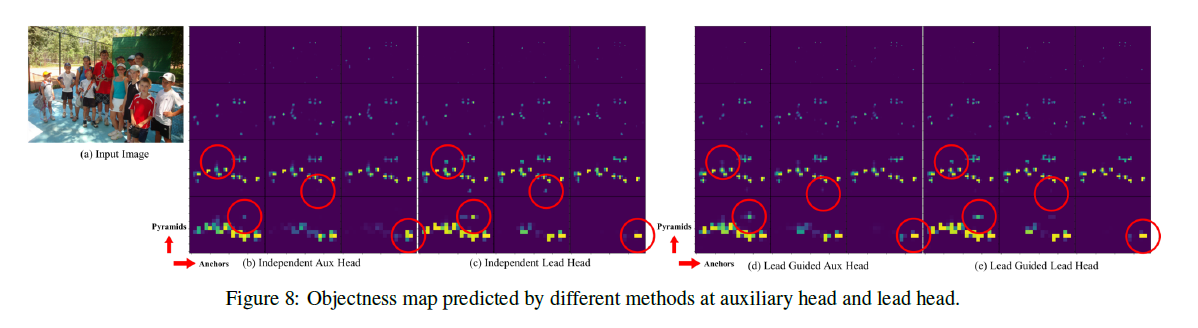
从Fig8的可视化结果可以看出,Lead Guided策略减少了噪声,提高了检测精度。
对于aux head,对于远离object中心的anchor box,我们可以将其objectness进行一个上限的限制。是否添加这个限制的测试结果见表7:
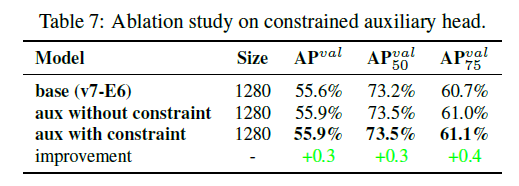
在表7中,”base”指的是基准模型,不加aux head。”aux without constraint”表示的是添加aux head,但没有objectness的限制。”aux with constraint”指的是添加aux head,并且有objectness的限制。
表8比较了”aux”和”partial aux”之间的性能区别:
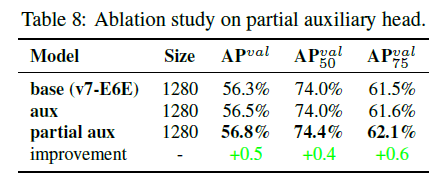
“aux”和”partial aux”的介绍见附录FigA4。
6.Conclusions
不再详述。
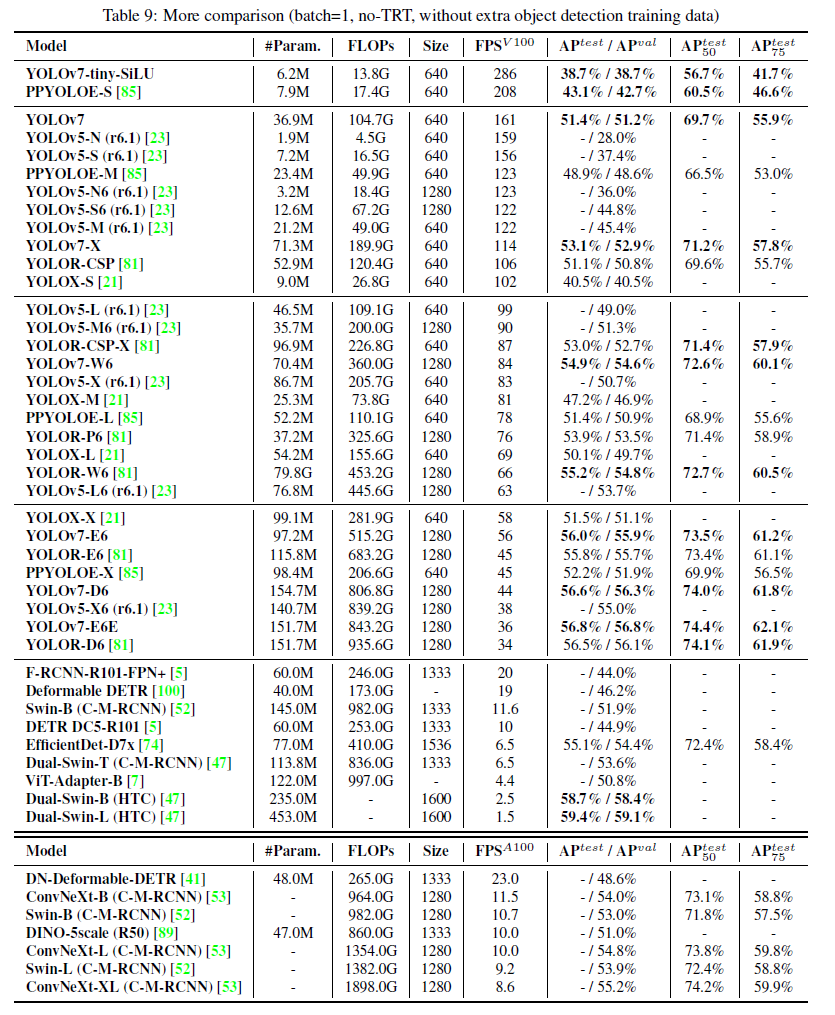
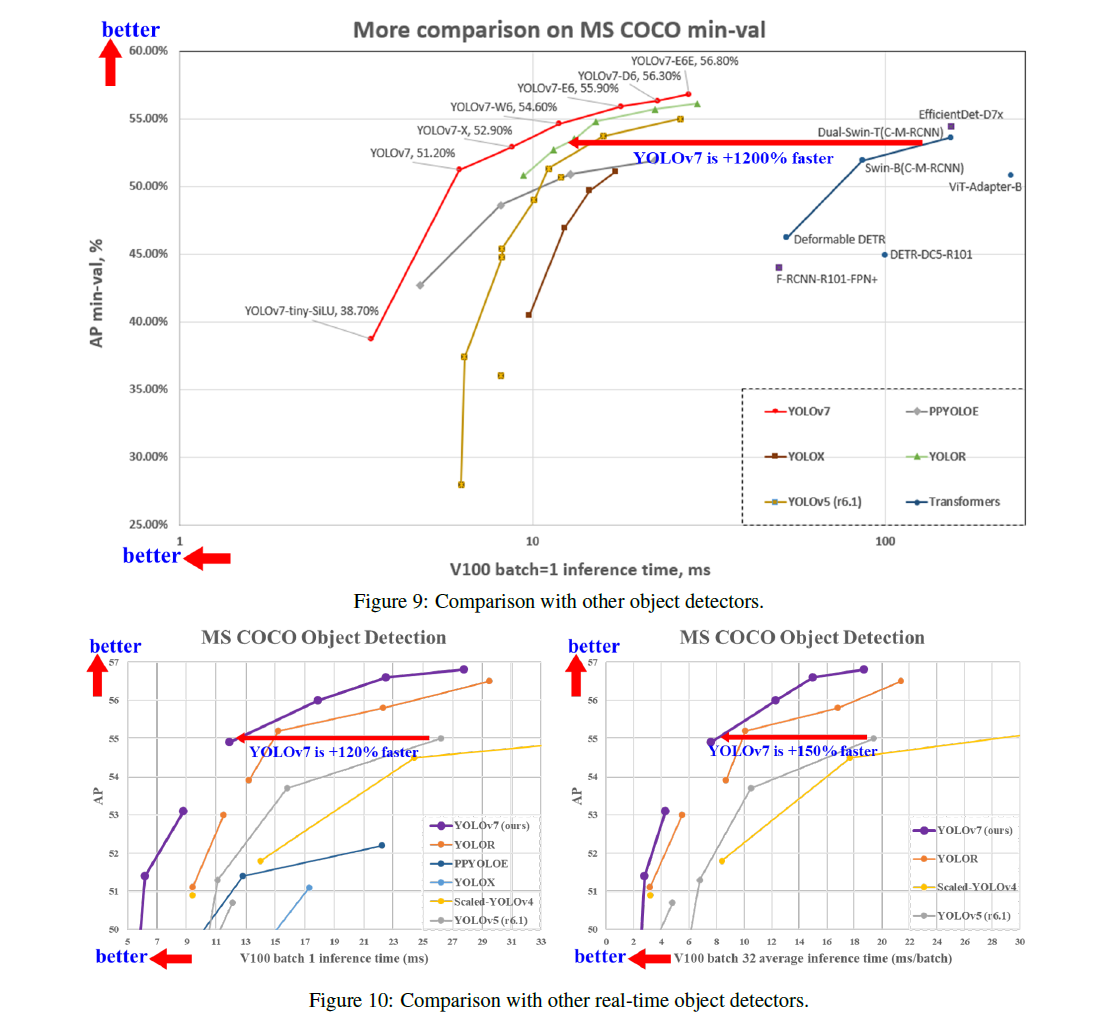
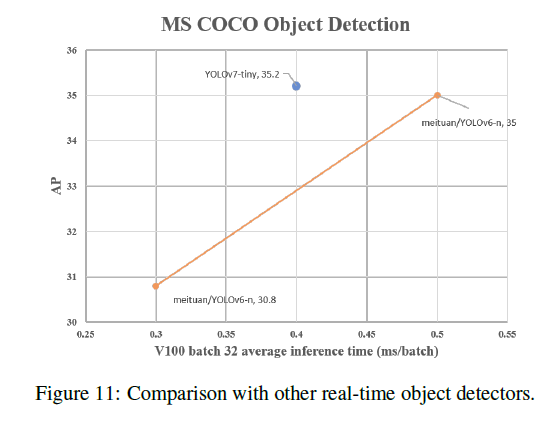
7.More comparison
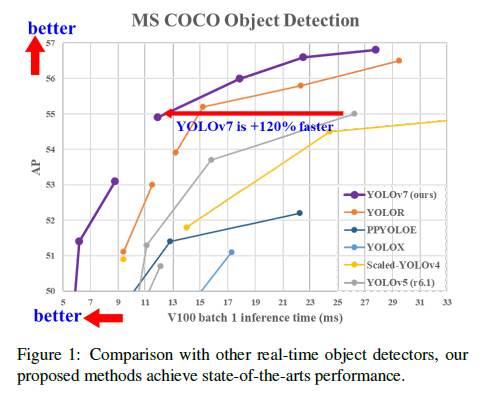
在5 FPS到160 FPS这个区间内,不管是精度还是速度,YOLOv7超过了所有已知的目标检测方法。
8.A.Appendix
8.A.1.Implementation details
8.A.1.1.Architectures
YOLOv7 P5的模型结构见FigA1:
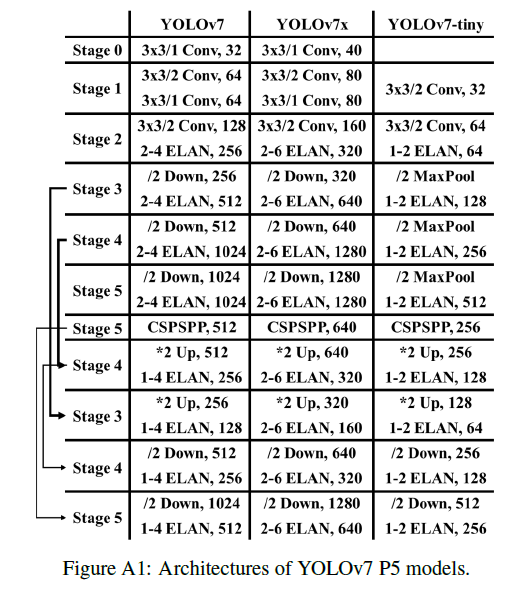
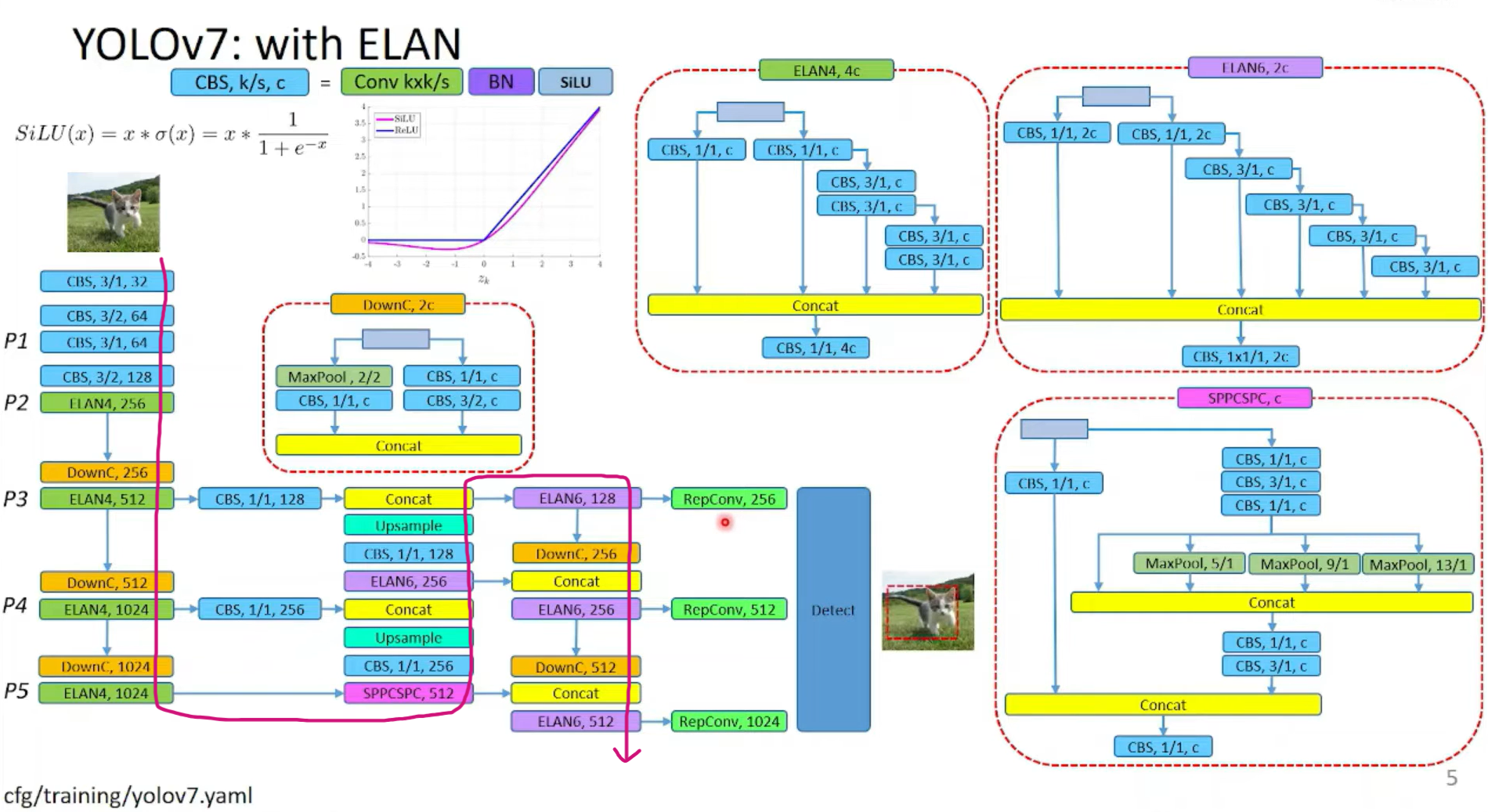
其中,YOLOv7的详细结构可参考下面两张图:
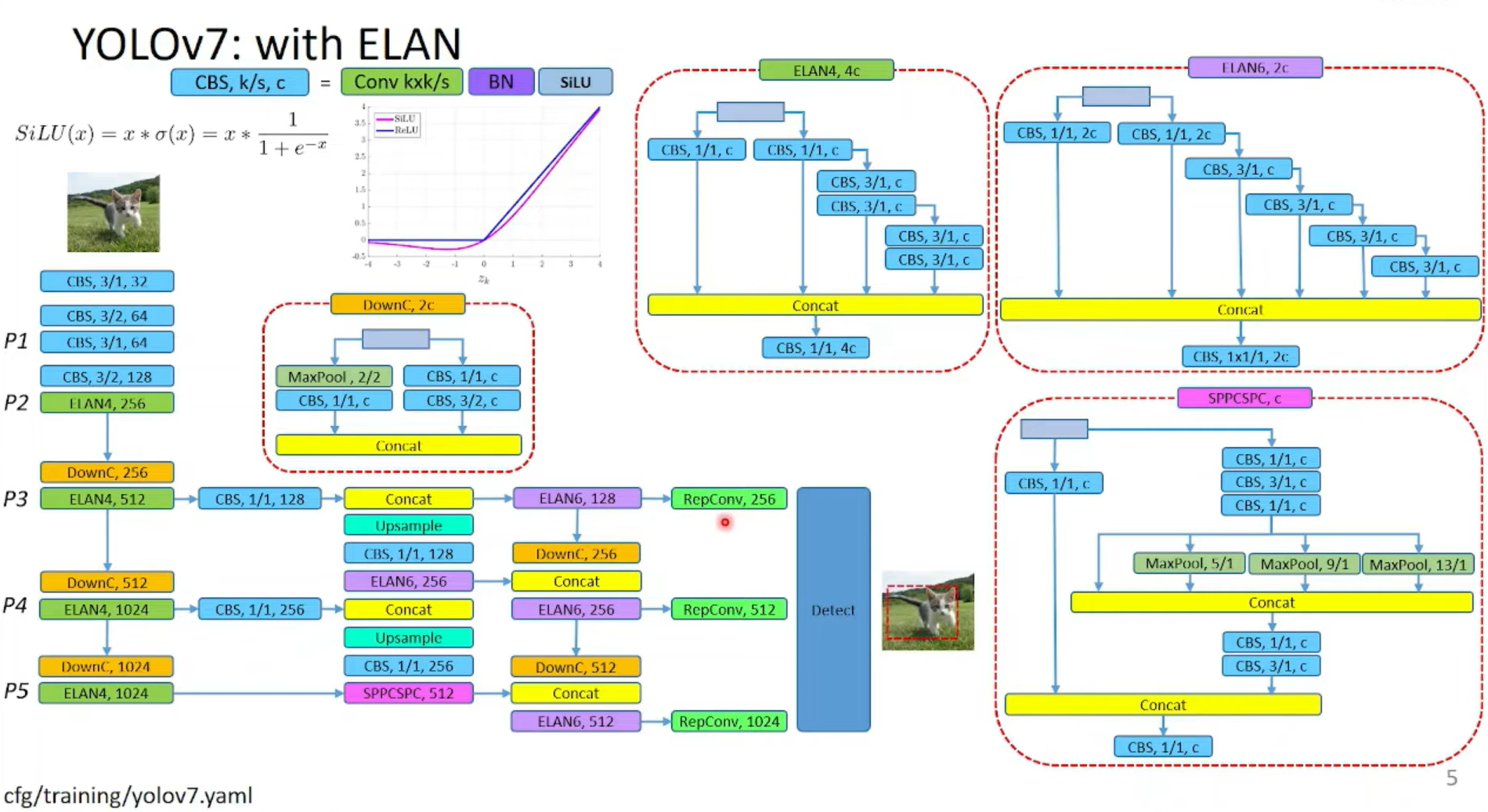
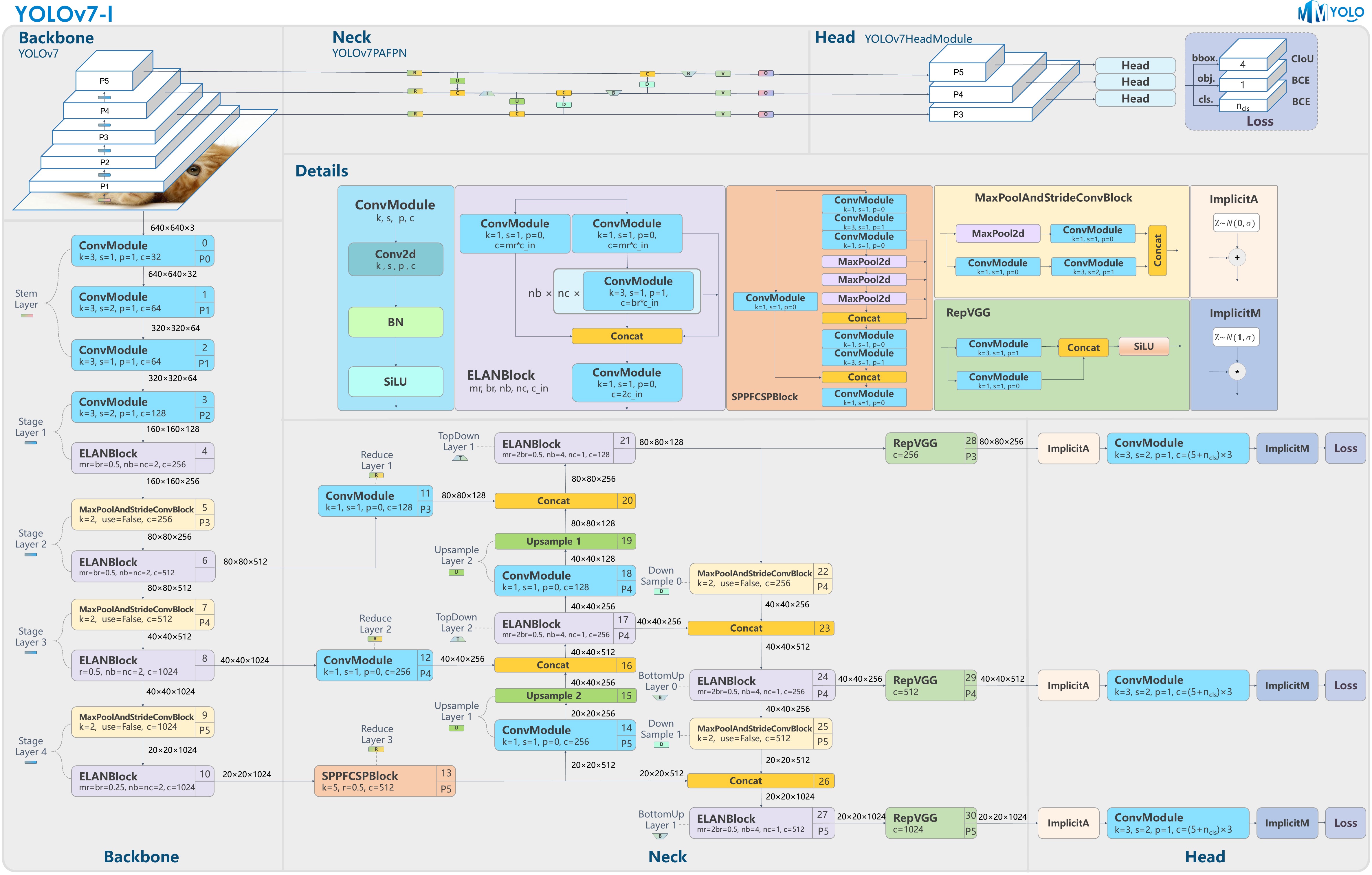
FigA1中的第一列YOLOv7是按照下图红色箭头所示的路径进行展示的:
YOLOv7 P6的模型结构见FigA2:
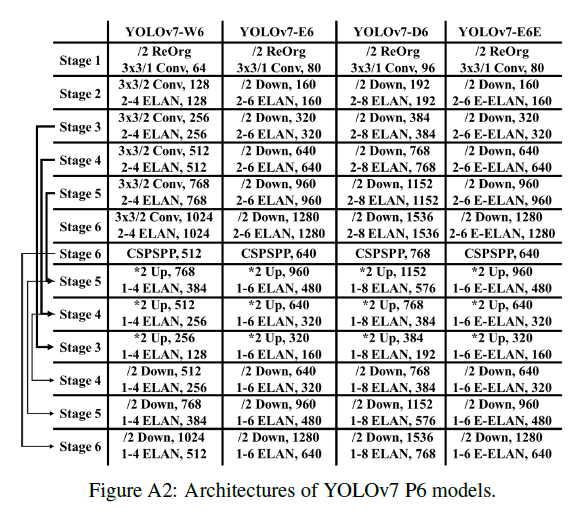
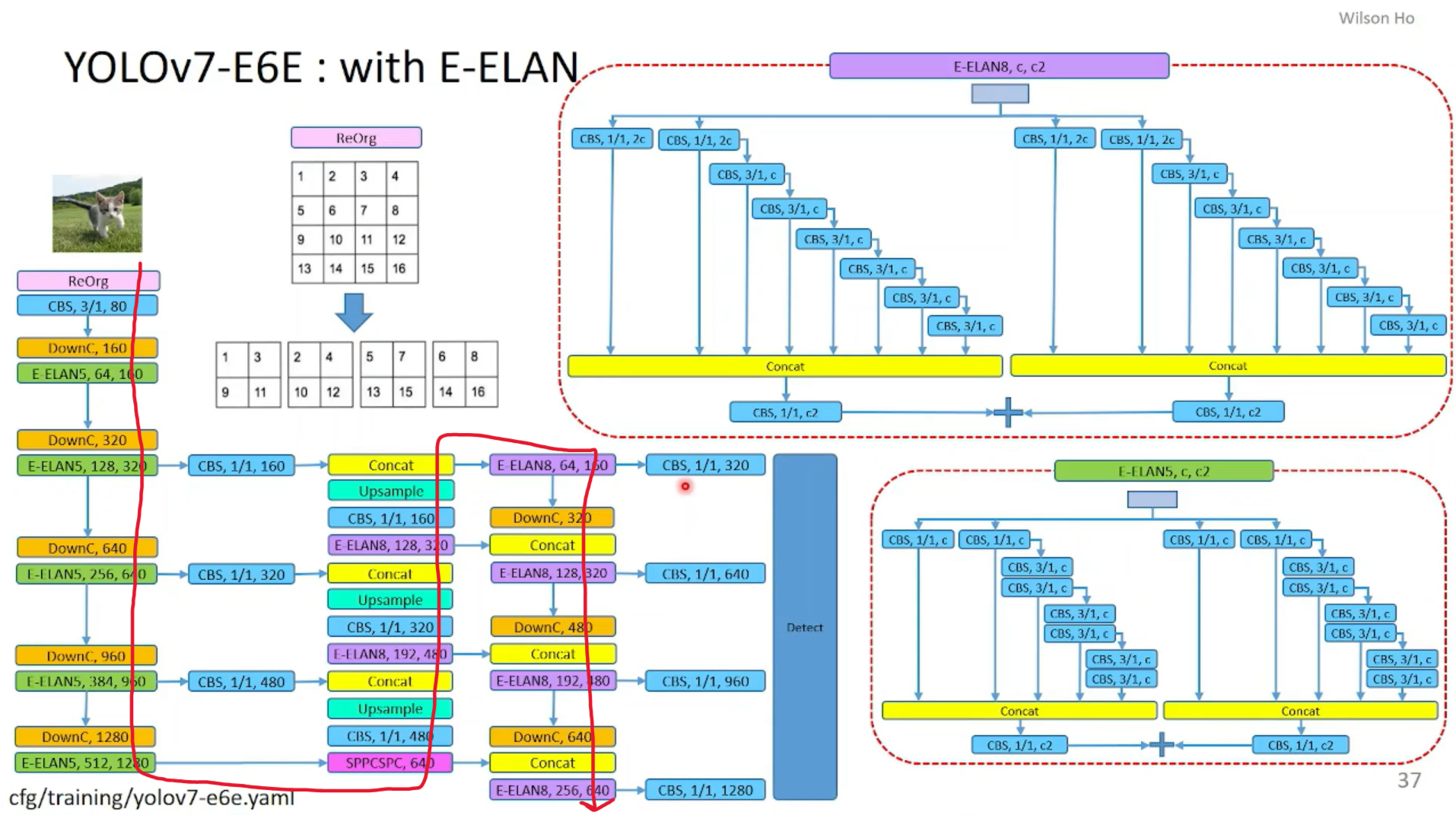
其中,YOLOv7-E6E的详细结构可参考下面这张图:
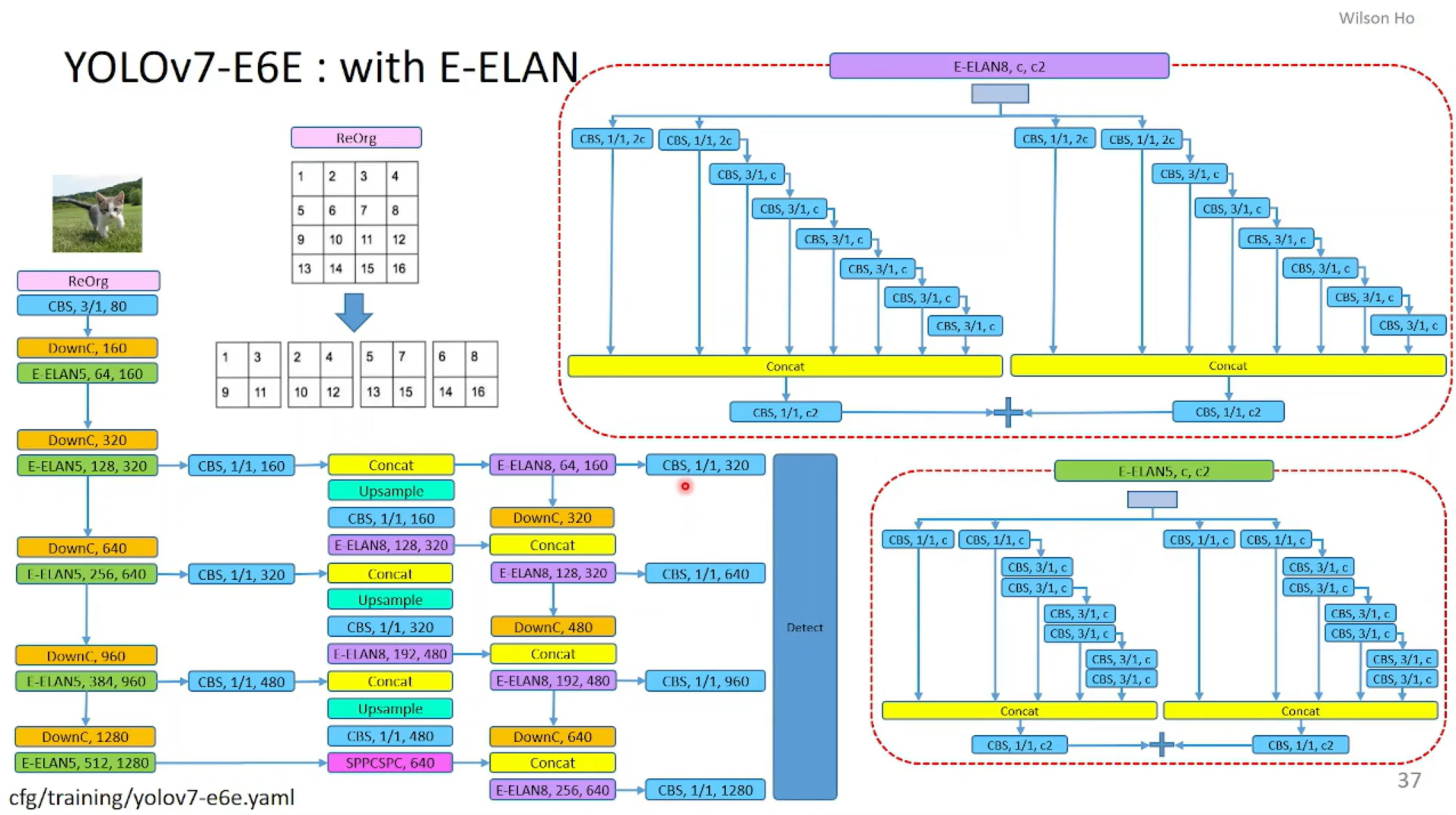
FigA2中的第四列YOLOv7-E6E是按照下图红色箭头所示的路径进行展示的:
在第3.1部分我们也提到过,对于E-ELAN框架,由于我们的edge devide不支持分组卷积和channel shuffle操作,所以采用了如FigA3(b)中的等价形式:
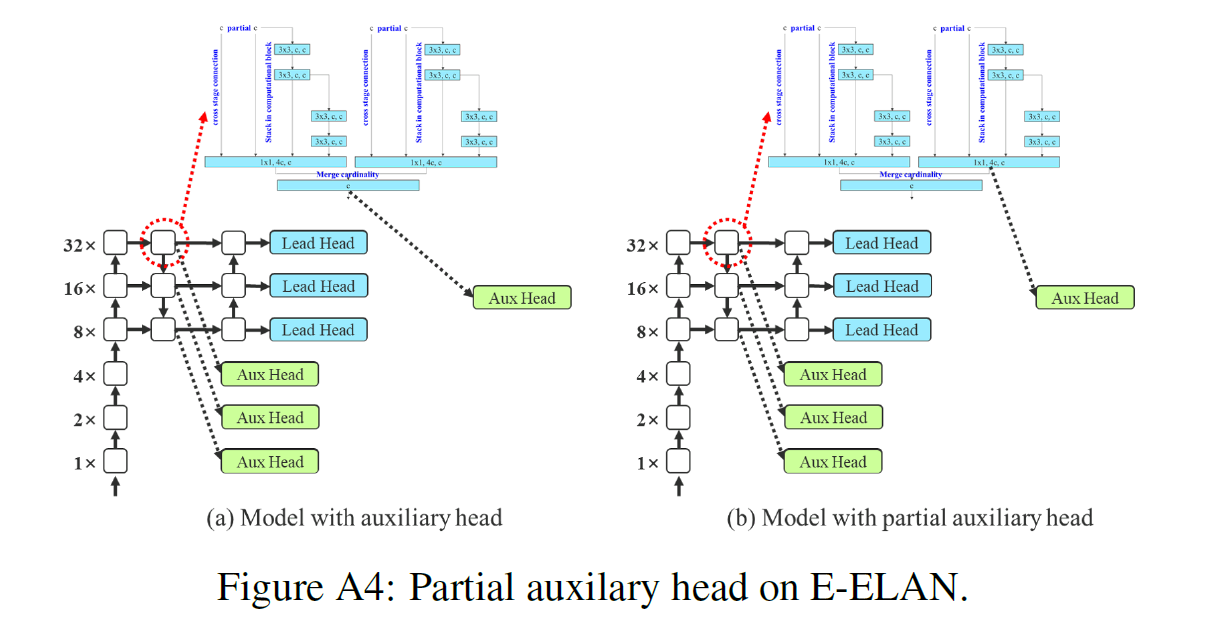
这种等价结构也使得我们更容易实现partial auxiliary head,如FigA4(b)所示。FigA4(a)是普通的auxiliary head。
接下来解释下第4.2部分提到的Coarse-to-fine lead head guided label assigner,即Fig5(e)所示的这种情况。
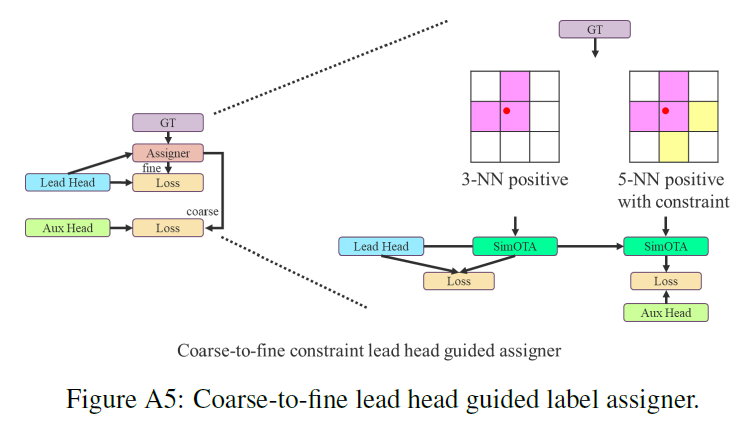
lead head和aux head都用到了SimOTA,FigA5中的3-NN positive和5-NN positive可参考在YOLOv4中对”Using multiple anchors for a single ground truth”部分的讲解,此处不再详述。对于lead head来说,3-NN positive就相当于是SimOTA中的fixed center area。对于aux head来说,其SimOTA的正样本搜索区域为fixed center area(即5-NN positive)、lead head的正样本以及GT box的并集。
8.A.1.2.Hyper-parameters
我们有3种不同的训练超参数设置。
👉第一种超参数设置:hyp.scratch.tiny.yaml,适用于YOLOv7-tiny。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.01 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.5 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 1.0 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.1 # image translation (+/- fraction)
scale: 0.5 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.05 # image mixup (probability)
copy_paste: 0.0 # image copy paste (probability)
paste_in: 0.05 # image copy paste (probability), use 0 for faster training
loss_ota: 1 # use ComputeLossOTA, use 0 for faster training
👉第二种超参数设置:hyp.scratch.p5.yaml,适用于YOLOv7和YOLOv7x。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.1 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.3 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 0.7 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.2 # image translation (+/- fraction)
scale: 0.9 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.15 # image mixup (probability)
copy_paste: 0.0 # image copy paste (probability)
paste_in: 0.15 # image copy paste (probability), use 0 for faster training
loss_ota: 1 # use ComputeLossOTA, use 0 for faster training
👉第三种超参数设置:hyp.scratch.p6.yaml,适用于YOLOv7-W6、YOLOv7-E6、YOLOv7-D6和YOLOv7-E6E。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
lr0: 0.01 # initial learning rate (SGD=1E-2, Adam=1E-3)
lrf: 0.2 # final OneCycleLR learning rate (lr0 * lrf)
momentum: 0.937 # SGD momentum/Adam beta1
weight_decay: 0.0005 # optimizer weight decay 5e-4
warmup_epochs: 3.0 # warmup epochs (fractions ok)
warmup_momentum: 0.8 # warmup initial momentum
warmup_bias_lr: 0.1 # warmup initial bias lr
box: 0.05 # box loss gain
cls: 0.3 # cls loss gain
cls_pw: 1.0 # cls BCELoss positive_weight
obj: 0.7 # obj loss gain (scale with pixels)
obj_pw: 1.0 # obj BCELoss positive_weight
iou_t: 0.20 # IoU training threshold
anchor_t: 4.0 # anchor-multiple threshold
# anchors: 3 # anchors per output layer (0 to ignore)
fl_gamma: 0.0 # focal loss gamma (efficientDet default gamma=1.5)
hsv_h: 0.015 # image HSV-Hue augmentation (fraction)
hsv_s: 0.7 # image HSV-Saturation augmentation (fraction)
hsv_v: 0.4 # image HSV-Value augmentation (fraction)
degrees: 0.0 # image rotation (+/- deg)
translate: 0.2 # image translation (+/- fraction)
scale: 0.9 # image scale (+/- gain)
shear: 0.0 # image shear (+/- deg)
perspective: 0.0 # image perspective (+/- fraction), range 0-0.001
flipud: 0.0 # image flip up-down (probability)
fliplr: 0.5 # image flip left-right (probability)
mosaic: 1.0 # image mosaic (probability)
mixup: 0.15 # image mixup (probability)
copy_paste: 0.0 # image copy paste (probability)
paste_in: 0.15 # image copy paste (probability), use 0 for faster training
loss_ota: 1 # use ComputeLossOTA, use 0 for faster training
此外,还有一个额外的超参数top k用于SimOTA。在训练$640\times 640$模型时,设置$k=10$。在训练$1280 \times 1280$模型时,设置$k=20$。
8.A.1.3.Re-parameterization
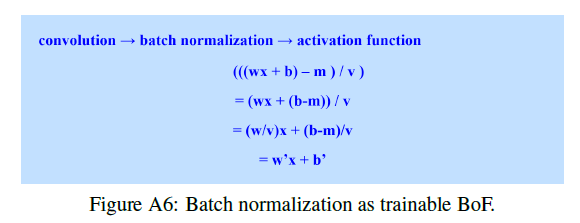
可参考RepVGG,将“卷积-BN-激活函数”重参数化为“卷积-激活函数”的公式见FigA6:
FigA7展示了在YOLOR中,如何将隐性知识合并在卷积中(个人理解:应该也是应用在推理阶段):
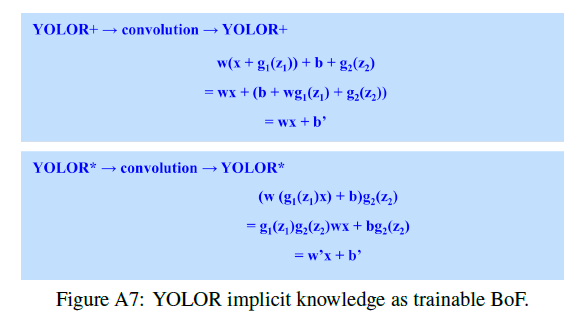
在FigA7上图中,先是加操作的隐性知识,然后执行卷积,接着又是一个加操作的隐性知识。在FigA7下图中,先是乘操作的隐性知识,然后执行卷积,接着又是一个乘操作的隐性知识。
8.A.2.More results
8.A.2.1.YOLOv7-mask
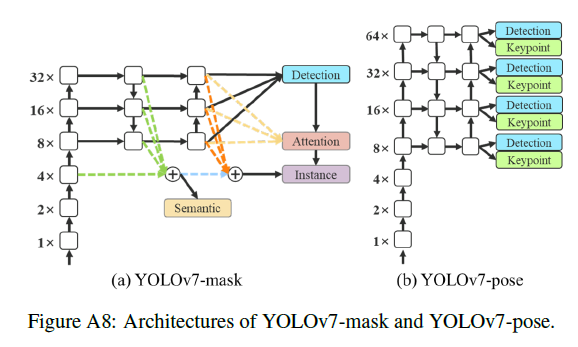
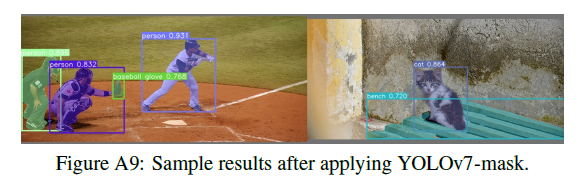
我们集成了YOLOv7和BlendMask用于实例分割。我们只是简单的将YOLOv7目标检测模型在MS COCO实例分割数据集上训练了30个epoch。它就达到了SOTA的实时实例分割结果。YOLOv7-mask的模型框架见FigA8(a),一些检测结果见FigA9。
BlendMask论文:Chen et al. BlendMask: Top-down meets bottom-up for instance segmentation. CVPR, 2020.。
8.A.2.2.YOLOv7-pose
我们集成了YOLOv7和YOLO-Pose用于关键点检测。我们遵循和YOLO-Pose一样的设置,将YOLOv7-W6人体关键点检测模型在MS COCO关键点检测数据集上进行fine-tune。YOLOv7-W6-pose达到了SOTA的实时人体姿态估计结果。YOLOv7-W6-pose的模型框架见FigA8(b),一些检测结果见FigA10。
YOLO-Pose论文:Maji et al. YOLO-Pose: Enhancing YOLO for Multi Person Pose Estimation Using Object Keypoint Similarity Loss. CVPRW, 2022.。
9.原文链接
👽YOLOv7:Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors
